





























[12]
Actuator Control Command
362
z
PSPL (Move along spline via CP operation)
Command, declaration
Extension
condition
(LD, A, O, AB, OB)
Input condition
(I/O, flag)
Command,
declaration
Operand 1
Operand 2
Output
(Output, flag)
E
N, Cnd
Cmnd
Operand 1
Operand 2
Pst
Optional Optional
PSPL
Start position
number
End position
number
PE
Applicable models
All models [Refer to Section 5.1 for details of models]
{
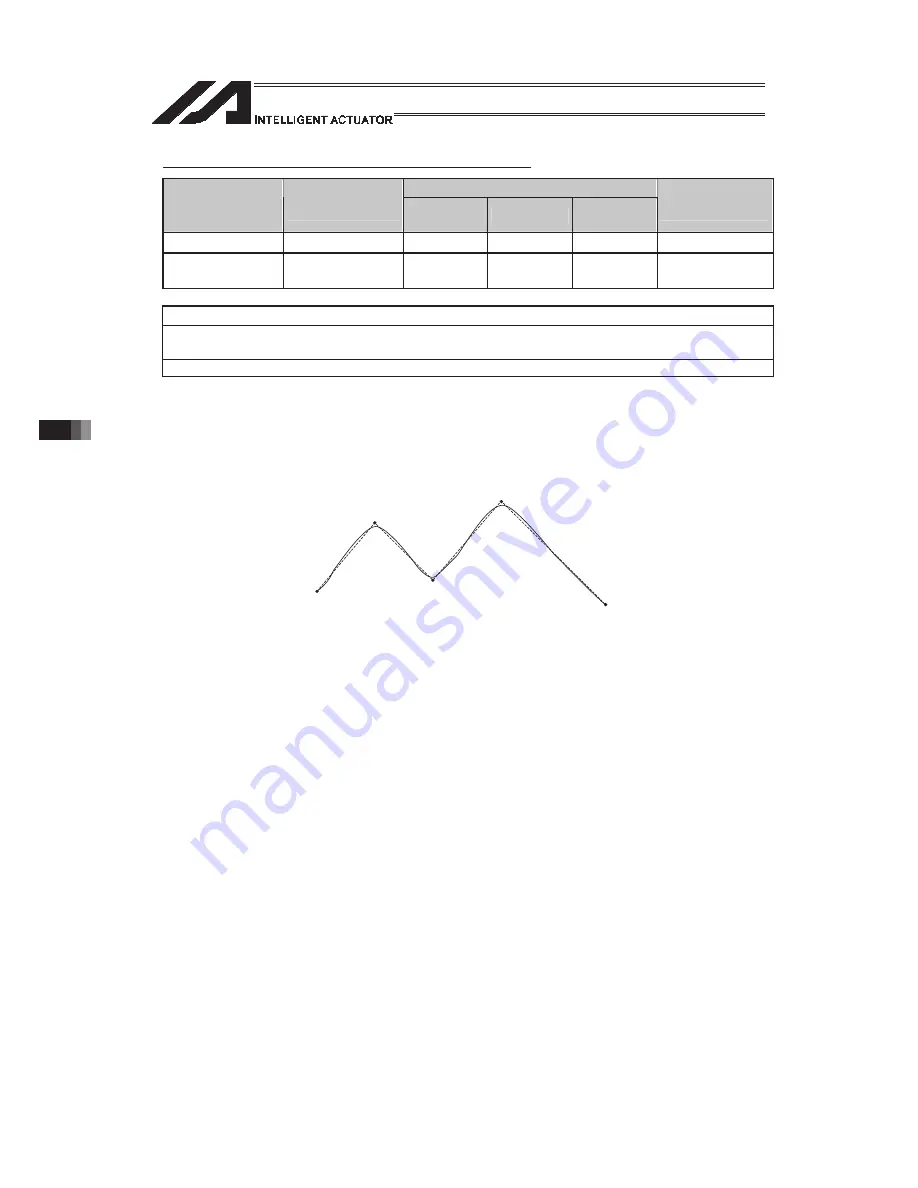
[Function]
Continuously move from the specified start position to end position via
interpolation along a spline-interpolation curve.
The output type in the output field can be set using an actuator-declaration
command POTP.
If invalid data is set for any position number between the start and end position
numbers, that position number will be skipped during continuous movement.
(The diagram above is an image.)
(Note 1)
If the acceleration and deceleration are different between points, the speeds will
not be connected smoothly.
In this case, input in operand 1 the point number of the next target, instead of the
predicted current position upon execution of the applicable command.
(Inputting a point number corresponding to the predicted current position will
trigger movement to the same point during continuous movement, thereby
causing the speed to drop.)
(Note 2)
In XSEL-PX/QX, a movement to a position that indicates the target for SCARA
axis and linear drive axis at the same time cannot be made. (421 “SCARA/Linear
Drive Axes Double Indication Error”)
Use GRP Command, or operate the position data of SCARA axis and linear drive
axis separately.
[Example]
PSPL
100
120
Continuously move from position Nos. 100 to 120
along a spline-interpolation curve.
Start position
Position origin
End position
Содержание PSEL
Страница 2: ......
Страница 10: ......
Страница 18: ...8 Part 1 Installation ...
Страница 37: ...27 Part 1 Installation 2 2 axis specification with battery ...
Страница 382: ...372 Appendix Micro cylinder RCL Series Current limiting value ratio Push force N ...
Страница 476: ...466 Appendix ...
Страница 480: ...470 ...
Страница 485: ...475 ...
Страница 487: ...INTELLIGENT ACTUATOR SEL Language Programming Manual Eighth Edition ...
Страница 488: ......
Страница 490: ......
Страница 494: ......
Страница 518: ...24 ...
Страница 526: ...32 ...
Страница 831: ... 11 Actuator Control Declaration 337 Example DFIF 1 170 ...
Страница 1060: ......
Страница 1061: ......





















































