





























80
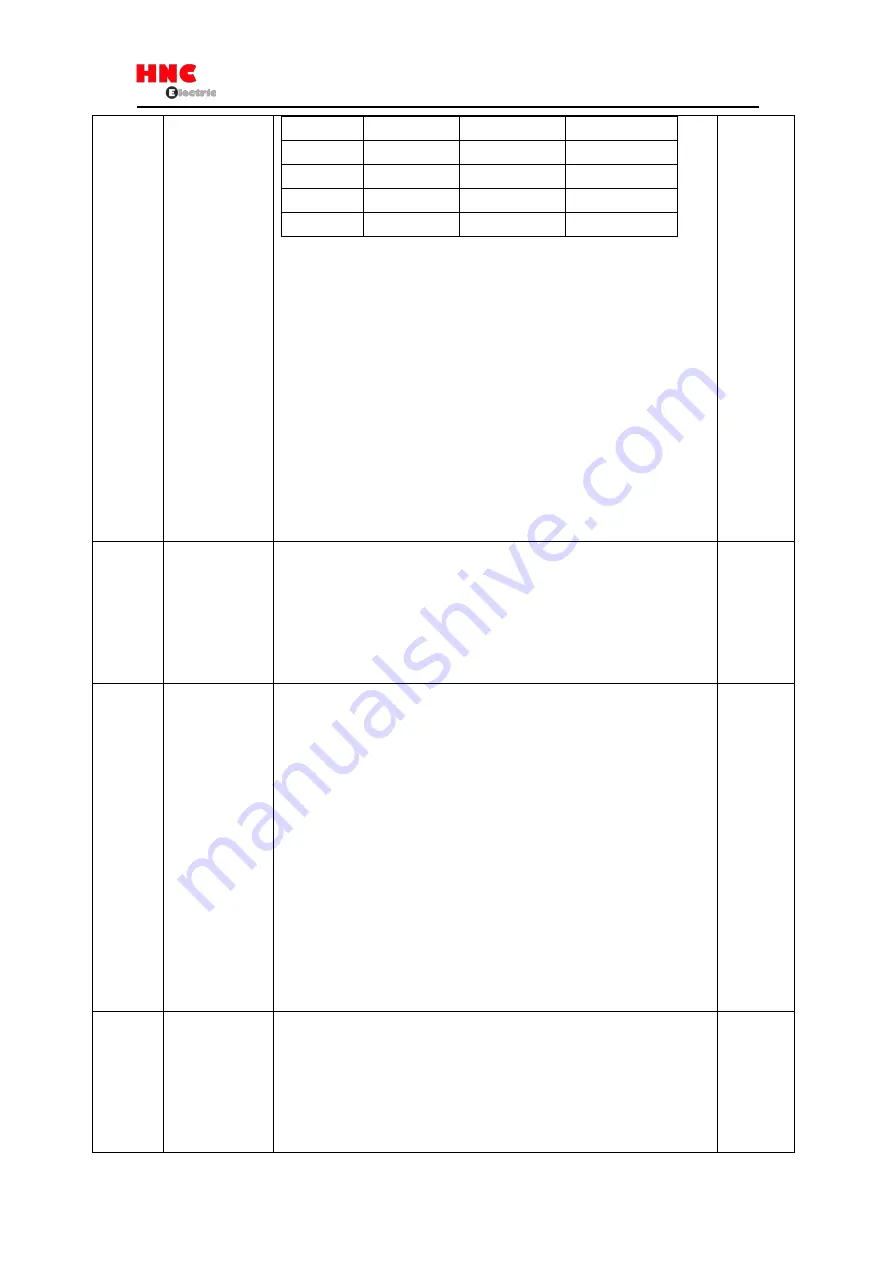
Target speed 8
4
Short circuited
Short circuited
Open
5
Open
Open
Short circuited
6
Short circuited
Open
Short circuited
7
Open
Short circuited
Short circuited
8
Short circuited
Short circuited
Short circuited
[Initial value]
Target speed 1: 500 [r/min]
Target speed 2: 1000 [r/min]
Target speed 3: 1500 [r/min]
Target speed 4: 2000
[r/min]
Target speed 5: 2500
[r/min]
Target speed 6: 3000
[r/min]
Target speed 7: 4000
(
200W
~
750W motor
)
[r/min]
3000
(
1KW
~
2KW motor
)
[r/min]
Target speed 8: 5000
(
200W
~
400W motor
)
[r/min]
4500
(
750W motor
)
[r/min]
3000
(
1KW
~
2KW motor
)
[r/min]
[Setting range] 0 to the highest speed of motor
642. 0
[Basic setting]
Internal speed
command -
Operation mode
Set Operation mode for position control mode and internal generation command.
0 = Point Table
1 = Communication operation
2 = Manual pulse input
[Initial value] 1 (Communication operation)
[Setting range] 0 to 2
No
643. 0
[Special setting]
Internal speed
command -
Overflow detection
option
Enable/Disable Internal position command Overflow detection function.
0 = Disable
1 = Enable
To prevent the absolute position from disappearing when the target position exceeds
the absolute position range in Point table or communication operation.
When “1 = Enable” is set and the target position (ABS position command) in operation
command exceeds absolute position, the alarm of internal position command overflow
will occur. When “0 = Disable” is set and the target position
exceeds absolute
position, it can implement relative operation, not the absolute operation. The relative
operation is that the point table operation command method is set to the operation of
relative value and test-run. The absolute operation is that the point table operation
command method is set to the operation of absolute value.
[Initial value] 1
[Setting range] 0 to 1
Yes
644. 0
[Special setting]
Point No. output
method
Set Point No. output method from user I/O output to PM1...3 in positioning operation.
0 = Output Operation start point at Operation start
1 = Output Operation start point at Operation end
2 = Output each point No.at each operation start
[Initial value] 1 (Output Operation start point at Operation end)
[Setting range] 0 to 2
No
Содержание SV-E3 Series
Страница 21: ...21 ...
Страница 25: ...25 ...
Страница 27: ...27 ...
Страница 28: ...28 ...
Страница 29: ...29 ...
Страница 30: ...30 3 5 Dimensions of servo drive Same dimensions for SV E3 ...
Страница 41: ...41 Figure 5 3 1 ...







































































