



























165
---
---
---
---
ON
ON
ON
Point No.7 and 15
The running operation and dwell time of Point NO. output in
「
Point No. output method
」
are shown below.
Table 2.6
Point No.
Running operation
Dwell time
1
Continuous
0
2
Continuous
0
3
Single
Arbitrary value
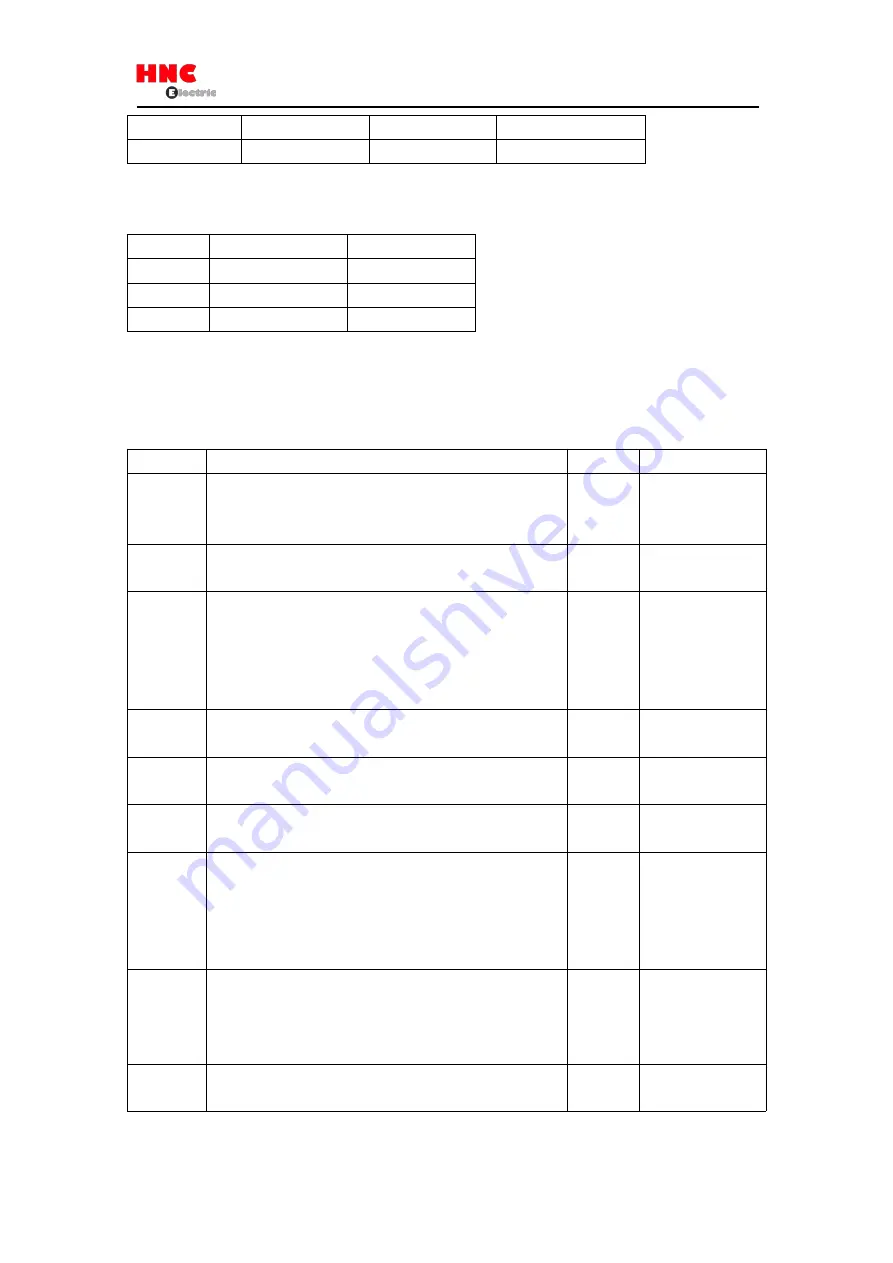
3. Point table operation
[3.1 Point table data]
The Point table setting are shown below.
Table 3.1 Point table data
Items
Description
Unit
Setting range
Command
method
Absolute value: Take the position data as the target position
Relative value: Take the travel distance from current position to target
position as the position data
-
Absolute value and
relative value
Running
operation
Single: Executing the selected one Point No.
Continuous: Execute the next Point No. continuously
-
Single, continuous
Position
1)Select absolute value according to command method
Set the target position
2) Select relative value according to command method
Set travel distance. Positive value: CCW rotation
Negative value: CW rotation
[Command
unit]
-1, 073, 741, 823
~
1, 073, 741, 823
Speed
Set the motor speed at positioning. And the setting value must not be
outside the max. speed of the motor.
[ rpm]
1~ max.speed of the
motor
Acceleration
time
Set the acceleration time for the motor, that is the time from 0rpm to
1000rpm
[ms/
1000rpm]
0
~
5000
Deceleration
time
Set the deceleration time for the motor, that is the time from 1000rpm
to 0rpm
[ms/
1000rpm]
0
~
5000
Dwell time
Set the dwell time for pause after the positioning completion has been
detected by Point no. positioning completion (range). Execute the
position command for the next Point No. after the dwell time. When
set the running operation to
「
Continuous
」
,the dwell time is
「
0
」
and
the next Point No. continues.
[ms]
0
~
20, 000
Positioning
completion
Set the position deviation value to determine positioning completion.
The dwell time begins after the position command completed
specified by the Point No. and the position deviation is within the
setting range. The unit is same to the encoder pulse unit.
[pulse]
0
~
32, 767
Valid/ invalid
Set the valid or invalid to the operation. When set the operation to
invalid, the Point No. will not execute until the next valid Point No.
-
Valid/ invalid
[3.2 Command unit setting]
Содержание SV-E3 Series
Страница 21: ...21 ...
Страница 25: ...25 ...
Страница 27: ...27 ...
Страница 28: ...28 ...
Страница 29: ...29 ...
Страница 30: ...30 3 5 Dimensions of servo drive Same dimensions for SV E3 ...
Страница 41: ...41 Figure 5 3 1 ...







































































