





























4 Feed Axis Operation
4.11.1 Motor Stop Methods When the Servo Is Turned OFF
4-44
4.11
Motor Stop Methods When the Servo is OFF or an Alarm
Occurs
Feed axes are stopped from the SERVOPACK when the SV_OFF (32 hex) command is sent during feed axis
motion or when an alarm occurs in the SERVOPACK (including power outages).
Refer to
8.2.4 Stopping Servomotor after SV_OFF Command or Alarm Occurrence
in the
Σ
-V-SD Series
User’s Manual
(Manual No.: SIEP S800000 78) for details on the motor stop methods that are used when the
servo is OFF or an alarm occurs.
Feed axes are often used for linear drive applications, so perform the following settings.
4.11.1
Motor Stop Methods When the Servo Is Turned OFF
Pn001.1 = 0 (Motor stop method = dynamic brake, Motor stop status = dynamic brake)
4.11.2
Motor Stop Methods When an Alarm Occurs
The method used to stop the motor when a Gr1. alarm occurs is the same as described in
4.11.1 Motor Stop
Methods When the Servo Is Turned OFF
.
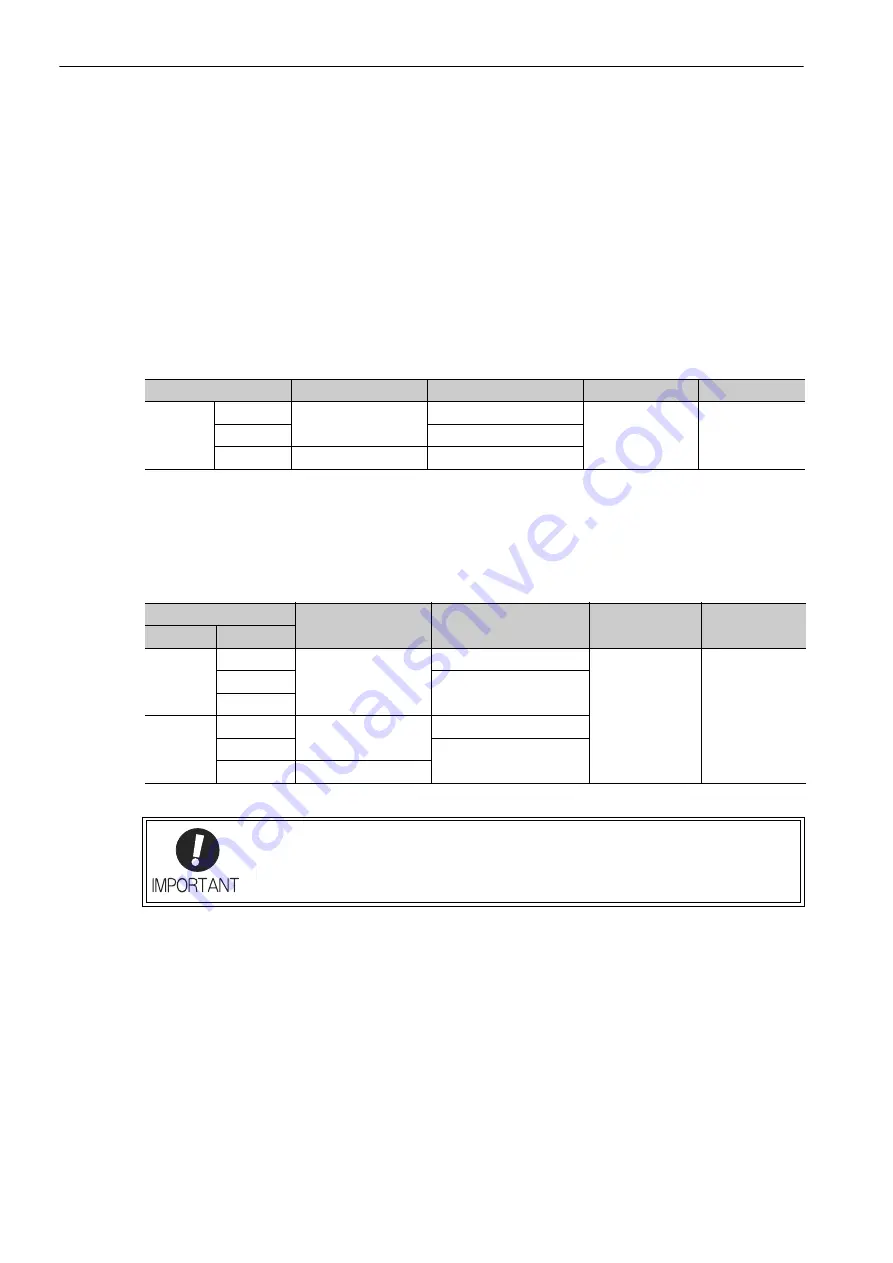
The method used to stop the motor when a Gr2. alarm occurs is as shown in the following table.
Pn00B.2 = 0 (Motor stop method = zero speed stop, Motor stop status = dynamic brake)
∗
Zero speed: Set the speed reference to 0 in the SERVOPACK to perform an immediate stop.
Parameter
Motor Stop Method
Status after Motor Stops
When Enabled
Classification
Pn001
n.
0
DB
Coasting
After restart
Setup
n.
1
DB
n.
2
Coasting
Coasting
Parameter
Motor Stop Method
Status after Motor Stops
When Enabled
Classification
Pn00B
Pn001
n.
0
n.
0
Zero speed
*
DB
After restart
Setup
n.
1
Coasting
n.
2
n.
1
n.
0
DB
DB
n.
1
Coasting
n.
2
Coasting
If a hard wire base block function is used and the axis enters the HWBB state, the brake
output signal (/BK) turns OFF (i.e., the brake is applied).
Refer to
7.7 Using the Hard Wire Base Block Function (HWBB)
for details on hard wire
base block function.