





























4.7 Homing
4-33
Feed Axis
Operation
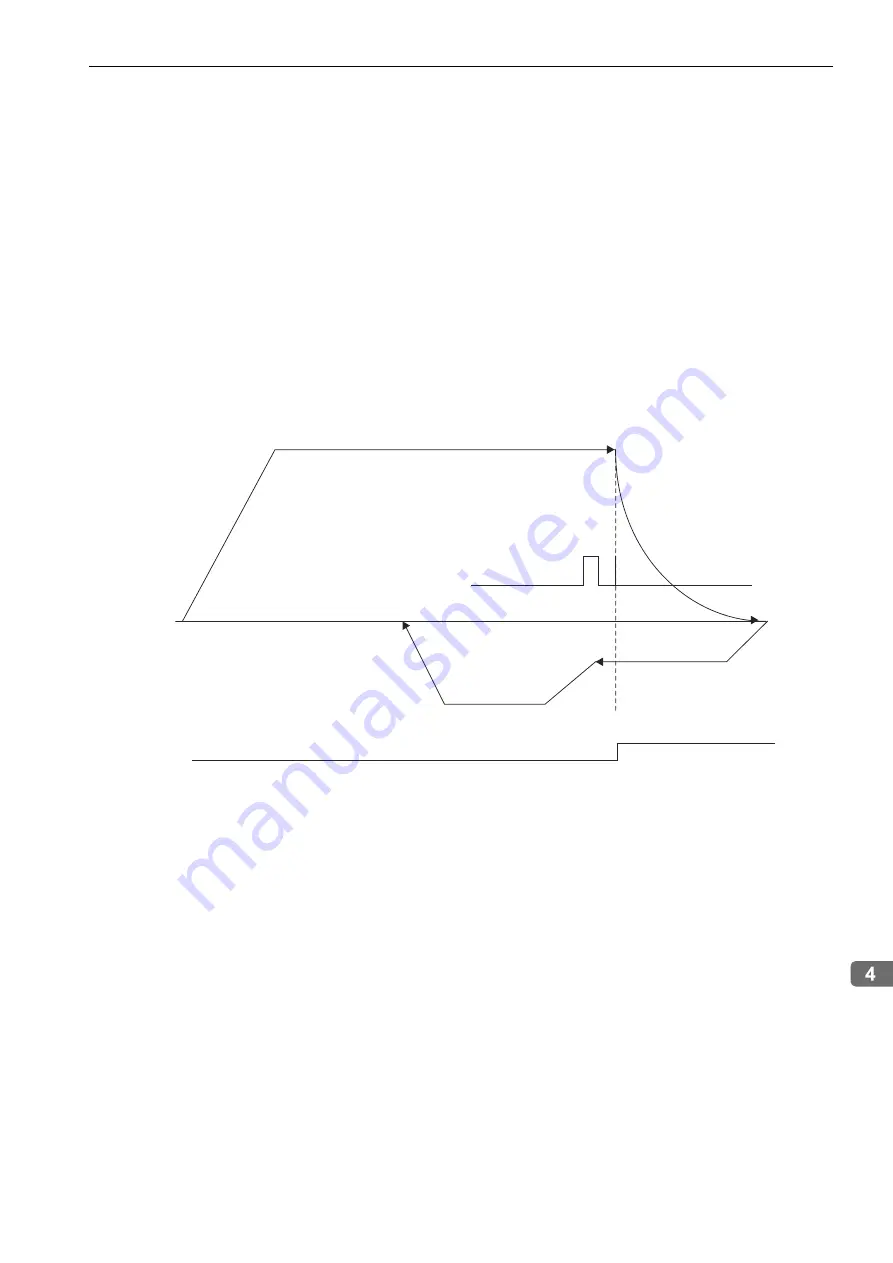
(5) OT & Phase-C Pulse
The feed axis starts to move at the approach speed in the specified direction.
When the rising edge of the overtravel signal (P-OT or N-OT) is detected, the travel direction is reversed and
the axis moves at the creep speed. When the first phase-C pulse is detected after passing the overtravel signal
(P-OT or N-OT), positioning is performed to move the axis the homing distance at the positioning speed.
When positioning has been completed, the machine coordinate system is established with the position at the
end of positioning as the origin.
Make the following settings to use the overtravel signal (P-OT or N-OT).
Parameter Pn001.1 = 1 (Changes the motor stop method from deceleration to a stop to zero clamp during the
overtravel operation.)
Parameter Pn406 (Sets the torque to decelerate to a stop during the overtravel operation.)
Parameter Pn50A.3 = 1 (Inputs the Forward Run Prohibited signal (P-OT) from CN1-7.)
Pn50B.0 = 1 (Inputs the Forward Run Prohibited signal (P-OT) from CN1-8.)
Bit 2 in common parameter 93 (Pn826) = 1 (Enable P-OT signal.)
Bit 3 in common parameter 93 (Pn826) = 1 (Enable N-OT signal.)
Step 1:
Motion is started at the approach speed in the specified direction. The host controller sequentially updates the
target position (TPOS) every communications cycle and sends the INTERPOLATE (34 hex) command so that
the axis moves at the approach speed.
INTERPOLATE command = 34 hex
TPOS = Target position (Reference is sent so that the axis moves at the approach speed.)
Step 2:
On the rising edge of the overtravel signal (P-OT or N-OT) at the approach speed, the axis stops at the torque
specified in parameter Pn406 and positioning is performed from that point.
Step 3:
The movement direction of the axis is reversed and the axis moves at creep speed.
The INTERPOLATE (34 hex) command is sent as follows:
• SVCMD_IO.P-OT = 0 to 1 (rising edge of P-OT signal)
• SVCMD_IO.N-OT = 0 to 1 (rising edge of N-OT signal)
• TPOS = Target position (Reference is sent so that the axis moves at the creep speed.)
Step 4:
Monitoring is performed for the rising edge of the overtravel signal (P-OT or N-OT) while moving the axis at
the creep speed.
The INTERPOLATE (34 hex) command is sent as follows:
• SVCMD_IO.P-OT = 1 to 0 (falling edge of P-OT signal)
• SVCMD_IO.N-OT = 1 to 0 (falling edge of N-OT signal)
Approach speed
Phase C
Homing travel distance
Positioning speed
Creep speed
OT signal (P-OT or N-OT)