





























7.6 Emergency Stop Processing
7-13
Alarm and W
arning Processing
7.6
Emergency Stop Processing
If an unexpected error occurs during machine operation, you must press the emergency stop button to stop the
machine safely.
Emergency stop processing for axes can be performed from either the host controller or from the SERVO-
PACK.
Furthermore, turning OFF the main circuit after an emergency stop can be controlled by either the host con-
troller or the power regeneration converter.
Method 1 in the above table provides a high amount of freedom in control based on the state of the machine
(e.g., the deceleration rates to stop axes can be controlled on an individual basis), but this also requires that the
host controller perform control based on the state of the machine and individual axes for processing until the
axes are stopped.
Method 3 uses the
Σ
-V-SD servo driver to both stop axes and turn OFF the main circuit.
Refer to the above table and select the optimal method for your particular machine configuration and axis stop
processing requirements.
Methods 2 through 4 require setting parameters in the SERVOPACK.
Refer to
7.6.1 Emergency Stop and Main Circuit Magnetic Contactor Control Settings
for details on these
parameter settings.
When the SERVOPACK is used to perform emergency stop processing and the power regeneration converter
is used to control the main circuit magnetic contactor, the following restrictions apply to the combination of
software used for the power regeneration converter and the SERVOPACK.
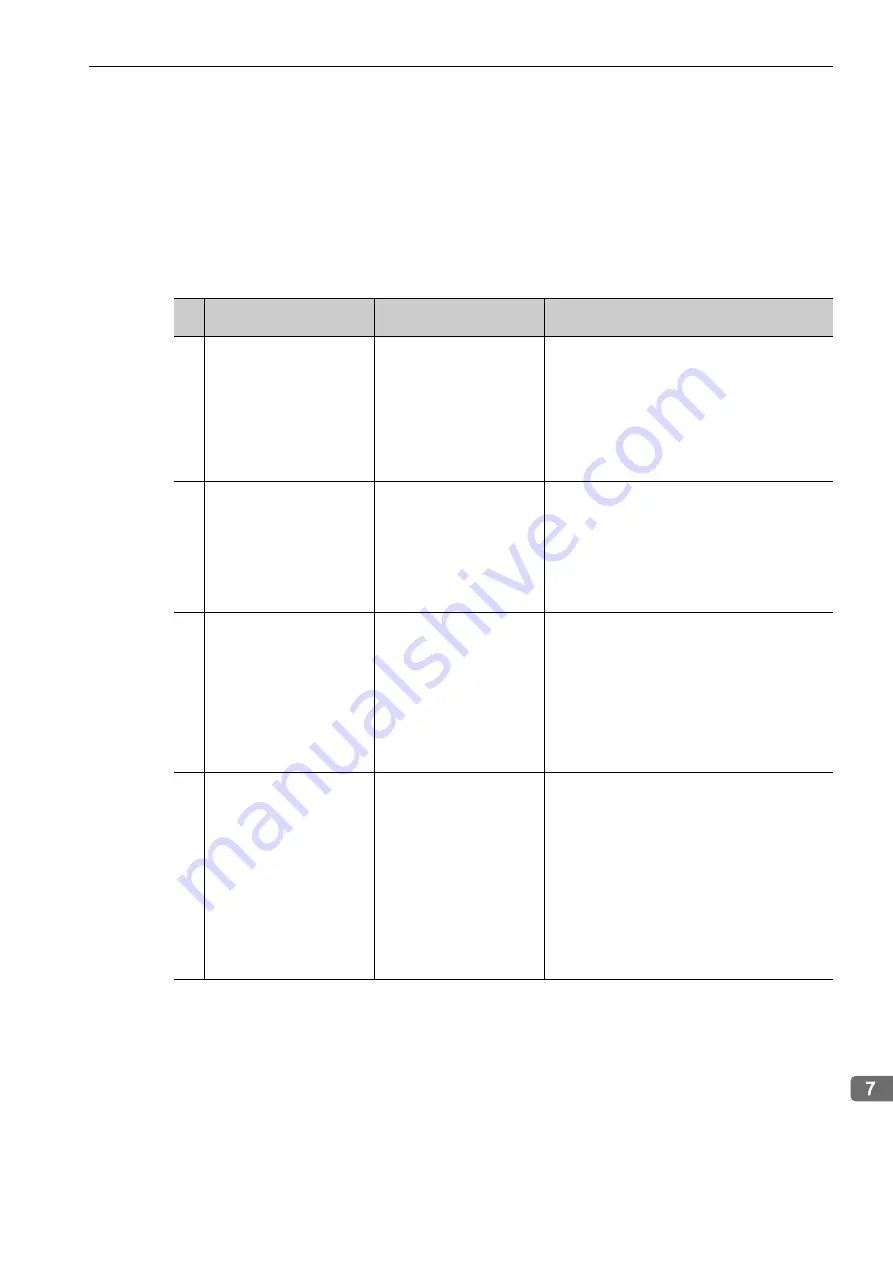
No
Emergency Stop Function
Main Circuit Magnetic
Contactor Control
Remarks
1
Use the host controller for
control.
Use the host controller for
control.
This method uses the host controller to stop the axes
and turn OFF the main circuit.
The emergency stop processing can be performed
based on the machine specifications, but the same
axis stop command must be used for all axes from
the host controller.
Refer to
7.6.2 Using the Host Controller to Per-
form Emergency Stop Processing and Turn OFF the
Main Circuit
.
2
Use the SERVOPACK for
control.
Use the host controller for
control.
This method does not require position control to
perform emergency stops.
After it has been confirmed that all axes are
stopped, the main circuit is turned OFF by the host
controller.
Refer to
7.6.3 Using the SERVOPACK to Perform
Emergency Stop Processing and the Host Controller
to Turn OFF the Main Circuit
.
3
Use the SERVOPACK for
control.
Use the power regeneration
converter for control.
This method uses the
Σ
-V-SD servo driver to pro-
cess both emergency stop and turning OFF the main
circuit, which results in less load on the host con-
troller.
The time to wait from when emergency stop signal
turns ON until the main circuit is turned OFF must
be set as a parameter.
Refer to
7.6.4 Using the SERVOPACK to Perform
Emergency Stop Processing and the Power Regen-
eration Converter to Turn OFF the Main Circuit
.
4
Use the host controller for
control.
Use the power regeneration
converter for control.
This method uses the host controller to stop the
axes.
The emergency stop processing can be performed
based on the machine specifications, but the same
axis stop command must be used for all axes from
the host controller.
The time to wait from when emergency stop signal
turns ON until the main circuit is turned OFF must
be set as a parameter.
Refer to
7.6.5 Using the Host Controller to Per-
form Emergency Stop Processing and the Power
Regeneration Converter to Turn OFF the Main Cir-
cuit
.