





























4-3
1.
TNU functions
4. TNU functions
TNU
1-2
Control functions overview
I/O communication is the function that uses communication to control the driver controller's input/
output function from the upper-level master device.
Further, Direct Value Control (hereafter DVC) is a function which, in addition to I/O communication,
designates values for target position, speed, etc. directly from the upper-level master device to
operate the actuator.
As well, data for current position, present current, and current speed can be read from the upper-
level master device.
Set one of types 0, 1, 2, or 3 for the driver controller function mode. Types 4 and 5 are not
supported.
◦
DVC function supporting models
TNU Ver 1.20 or later
◦
DVC function tupes
The DVC functions include the following 3 types of input mode.
The input mode can be set for each driver controller, and input can also be mixed within a range
not exceeding the link point count according to stations and multiple settings.
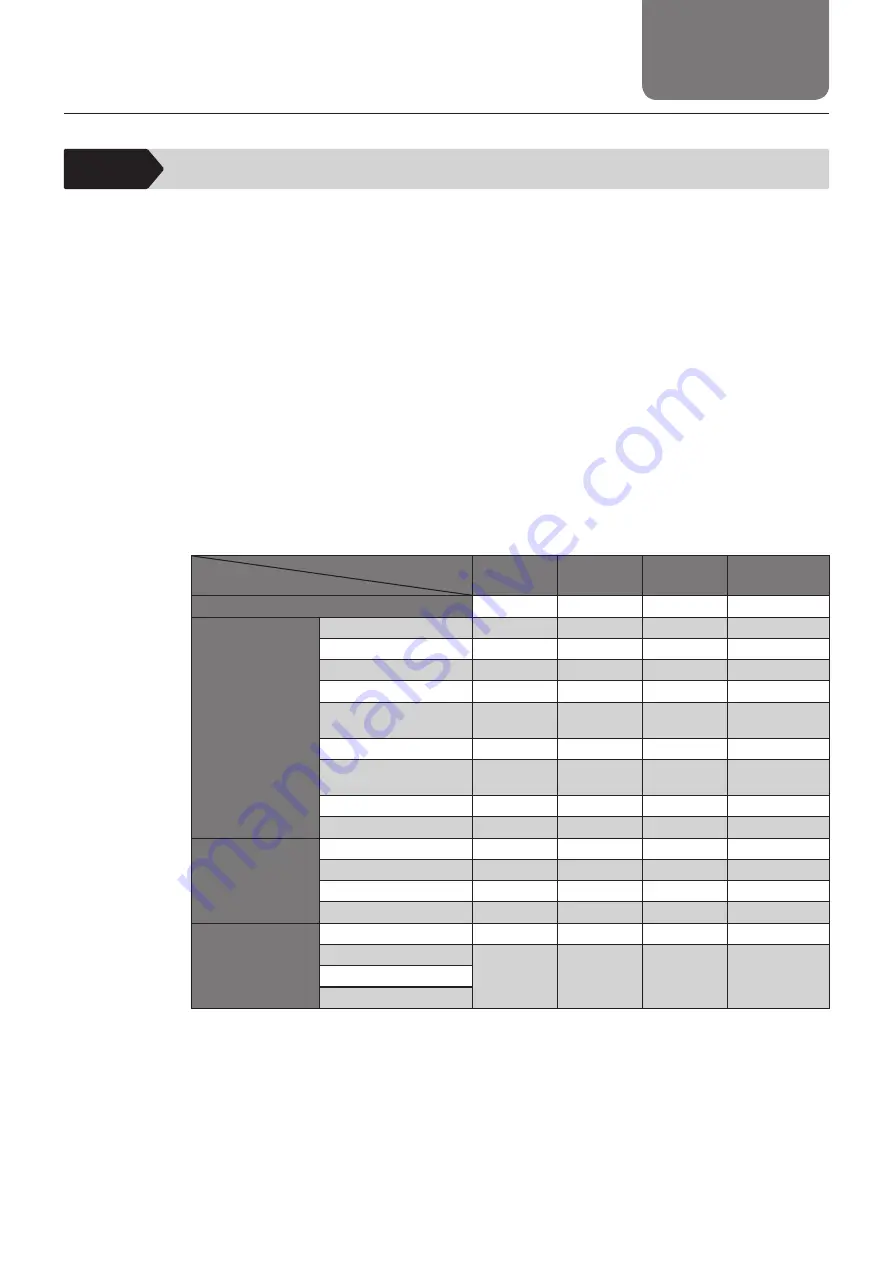
Input mode
Functions list
I/O
communication Simple DVC Half DVC
Full DVC
I/O communication
○
○
○
○
Numerical
designation
Target position
*1
×
○
○
○
Speed
×
×
○
○
ACC
×
×
○
○
DCC
×
×
Same value as ACC
○
Positioning completion
width
×
×
○
○
Current limit on pressing
*2
×
×
○
○
Load current threshold
value
×
×
×
○
P area A
×
×
×
○
P area B
×
×
×
○
Reading items
Current position
×
○
○
○
Present current
×
×
○
○
Present speed
×
×
○
○
Status signals
×
○
○
○
Maximum number of
connectable axes
*3
CC-Link
16 axes
16 axes
8 axes
4 axes
EtherCAT
16 axes
16 axes
15 axes
8 axes
EtherNet/IP
DeviceNet
*1 The target position is designated with absolute coordinates only, and operation will take place with
absolute coordinates even if relative coordinates are designated for the operation pattern.
*2 When using DVC functions to carry out pressing operation, if the DVC switch is left ON, a position
data error will occur at pressing completion. For this reason, when carrying out pressing operation
through DVC, turn the DVC switch OFF until operation completion.
As well, position data errors also occur when pressing operation commands are given for stop
modes other than full servo control (SERVO).
*3 The maximum connectable axis number for all axes simultaneous input mode. (Differs when modes
are mixed)
www.thk.ru
тел. +7(499) 703-39-86







































































