





























VS
07.94
1-125
Siemens AG 1997 All Rights reserved
SIMODRIVE 611A Installation and Start–Up Guide/IAA/–04.97 Edition
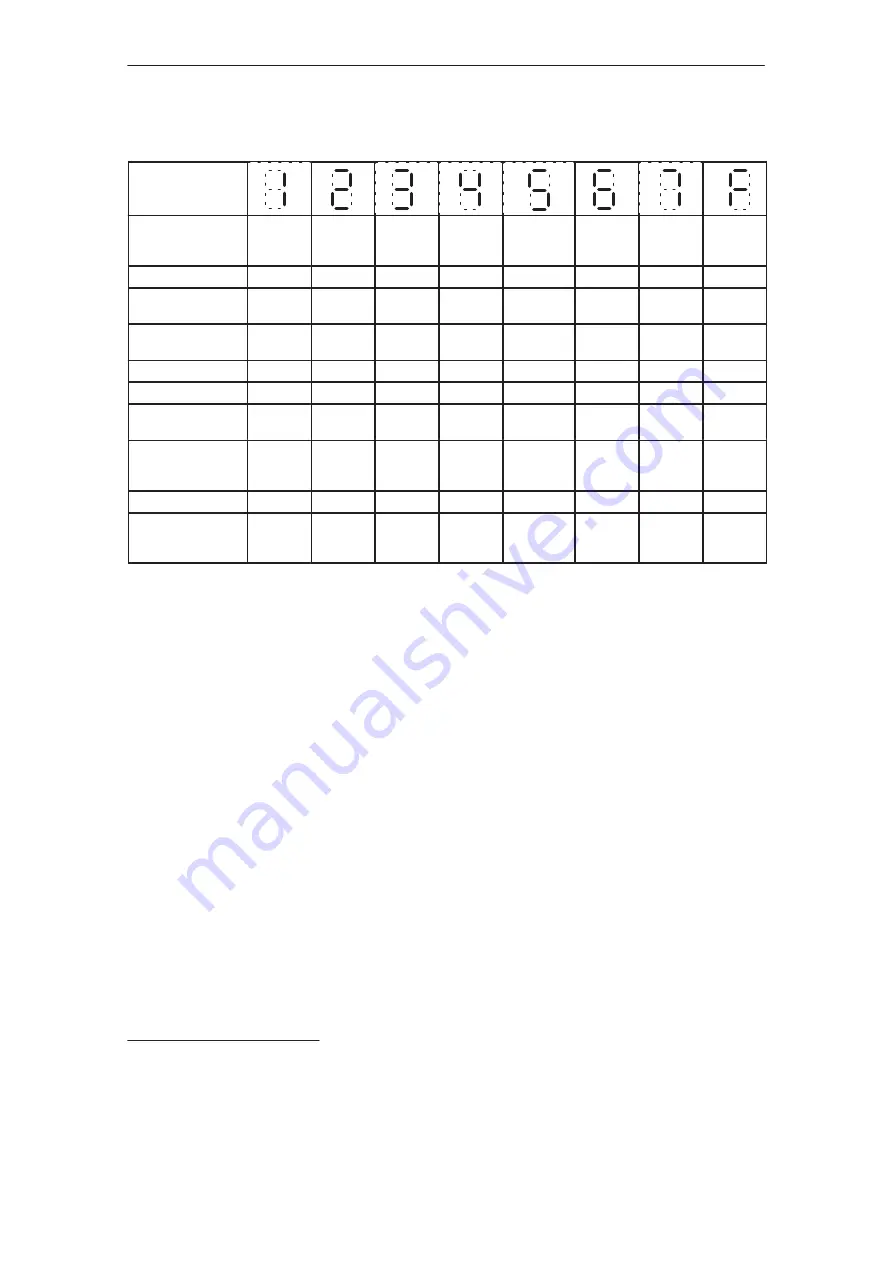
Fault
I
2
t monitoring or
heatsink tempera-
ture overtemp.
X
X
Rot. pos. encoder
X
Speed controller
at its limit
X
X
X
Tachometer
monitoring
X
I
act
= 0
X
Motor overtemp.
X
5 V undervoltage (5
V faulted)
X
Effect:
Current li-
miting
Pulse
cancel.
Pulse
cancel.
Pulse
cancel.
Pulse
cancel.
Pulse
cancel.
Pulse
cancella-
tion
Signal, NE:
Term. 5.x
–
Term. 5.x
–
–
–
–
–
Message FD:
T.291
T.297+
T.672/
T.674
T.5.x
T.294
T.297+
T.672/
T.674
T.672/
T.674
T.288+
T.672/
T.674
T.288+
T.672/
T.674
T.672/
T.674
1)
Sequence when the temperature– or I
2
t monitoring responds
I
2
t monitoring:
– an alarm is issued at terminal 5.x of the NE module (non–latching) a minimum of 250 ms before
limiting is activated
– when limiting is activated, fault 1 is displayed and a signal is output at terminal 291 (latching)
Heatsink temperature rise monitoring:
– an alarm is issued at terminal 5.x of the NE module when the heatsink shutdown temperature is
reached (non–latching)
– the pulses are inhibited, fault 1 is displayed and a signal is output at terminal 291 + terminal
672/terminal 674 after typically 4 s (latching)
Motor overtemperature
SIMODRIVE 611 feed modules with closed–loop control for 1FT5 servomotors are equipped with an eva-
luation circuit for the PTC thermistors integrated in the motor windings.
The motors are protected from inadmissible high winding temperatures with the monitoring combination
(tripping temperature 150
C).
As the drive shouldn’t unpredictably intervene in the machining process, the trip is only signaled to the
SIMODRIVE 611 via individual fault signal terminal 289/294/296 (latching) or centrally via terminals 5.1,
5.2 and 5.3 of the infeed module (latching) when the response temperature is reached (the drive is not
shutdown).
There is no internal system response to protect the motor. The user must ensure that the motor can ther-
mally recover after the signal has been issued, by appropriately configuring the adaptation control. In this
case, it may be required to immediately shutdown the motor.
1) Depending on the mode (ready/fault signal)
Fault display
Feed modules (VS)
03.96
8.1.1 User-friendly interface
Summary of Contents for SIMODRIVE 611A
Page 2: ......
Page 6: ......
Page 7: ...SECTION 0 PRELIMINARY INFORMATION 0 7 ...
Page 8: ......
Page 17: ...Section 1 611A Analog Feed Drives 1 17 ...
Page 18: ...1 18 ...
Page 24: ...1 24 ...
Page 39: ...1 39 ...
Page 70: ...1 70 ...
Page 119: ...1 119 ...
Page 120: ......
Page 123: ......
Page 131: ......
Page 158: ...1 158 ...
Page 159: ...1 159 MOUNTING DIMENSIONS ...
Page 160: ...1 160 ...
Page 186: ......
Page 187: ...GENERAL INFORMATION REGARDING AC SERVO MOTORS AL S ...
Page 188: ......
Page 225: ...1FT5 AC SERVO MOTOR DESCRIPTIONS 1FT5 ...
Page 226: ......
Page 321: ...FEEDBACK DEVICES FOR 1FT5 GE ...
Page 322: ......







































































