




























Chapter 7. Usage of Various Functions
7-31
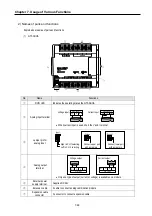
Examples of process control by forward and reverse actions
(14) PID Algorithm
In GM7U, two type of PID algorithm is available, The velocity form(Speed) and positioning form.
Velocity form(Speed) operates incremental manners. Namely, It calculates the change(
∆
n) required from
previous manipulate value(MVn-1), But positioning form calculates an absolute manipulate value(MVn) every
sampling steps. Generally, The velocity form is suit for the system which’s load change is slow like temperature
control system, and positioning form is useful for system which’s load change is fast.
b)
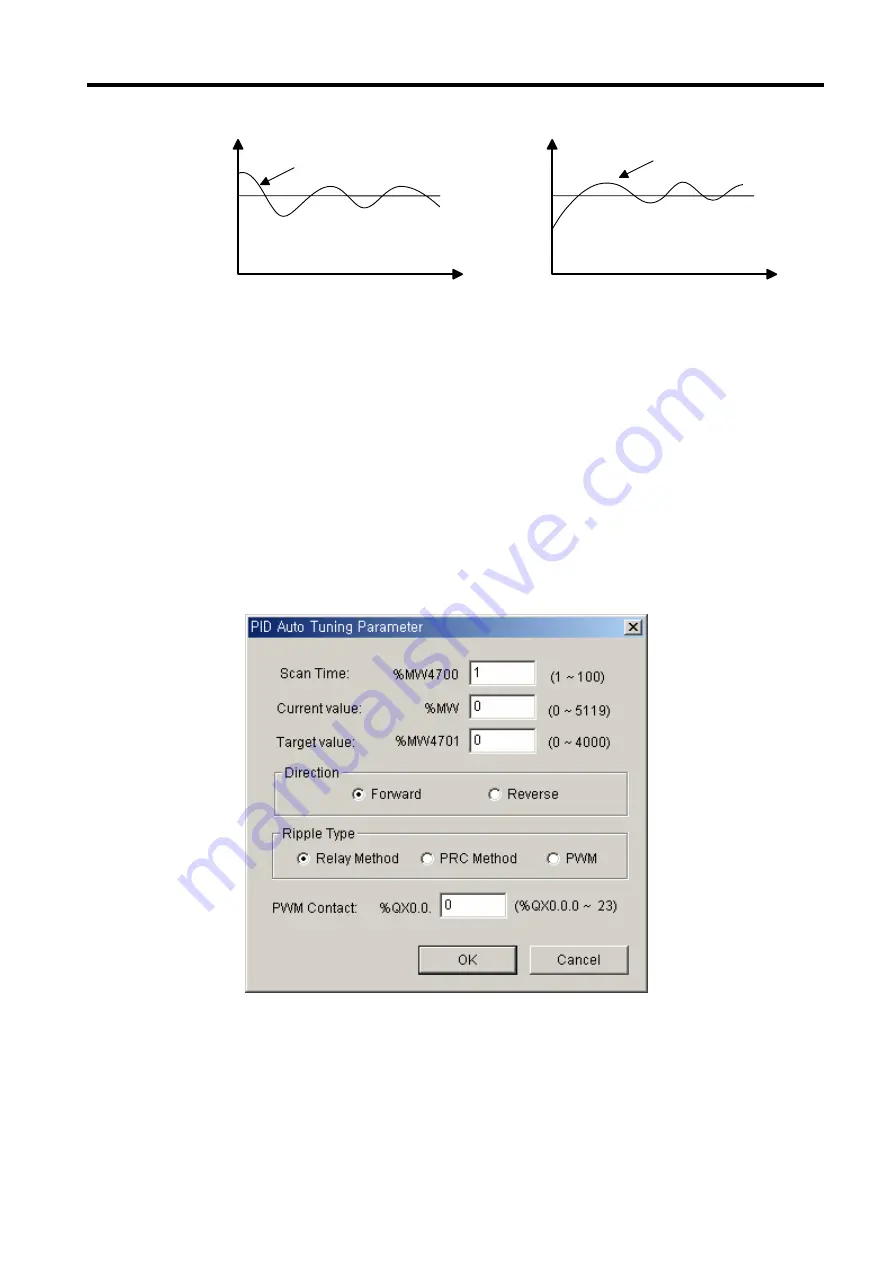
PID Auto Tuning Parameter settings
Scan time
①
(%MW4700)
Scan Time is the period of reading data (sampling), and 10 times scaled up for more precious operation.
The range of sampling time is 0.1 ~ 10 seconds, and actual input range is 0 ~ 100.
Time
Temp
erat
ure
Time
Tem
perat
ure
SV
SV
PV
PV
Reverse action (for cooling)
Forward action (for heating)
Summary of Contents for GLOFA G7M-DR20U
Page 28: ...Chapter 4 Names of Parts 4 3 2 G7M DRT60U N 3 G7M DT60U N 4 G7M DT60U P...
Page 29: ...Chapter 4 Names of Parts 4 4 5 G7M DR60U DC 6 G7M DRT60U N DC 7 G7M DT60U N DC...
Page 31: ...Chapter 4 Names of Parts 4 6 3 G7M DT40U N 4 G7M DT40U P 5 G7M DR40U DC...
Page 32: ...Chapter 4 Names of Parts 4 7 6 G7M DRT40U N DC 7 G7M DT40U N DC 8 G7M DT40U P DC...
Page 33: ...Chapter 4 Names of Parts 4 8 4 1 3 30 point main unit 1 G7M DR30U 2 G7M DRT30U N 3 G7M DT30U N...
Page 34: ...Chapter 4 Names of Parts 4 9 4 G7M DT30U P 5 G7M DR30U DC 6 G7M DRT30U N DC...
Page 36: ...Chapter 4 Names of Parts 4 11 2 G7M DRT20U N 3 G7M DT20U N 4 G7M DT20U P...
Page 37: ...Chapter 4 Names of Parts 4 12 5 G7M DR20U DC 6 G7M DRT20U N DC 7 G7M DT20U N DC...
Page 38: ...Chapter 4 Names of Parts 4 13 8 G7M DT20U P DC...
Page 159: ...Chapter 7 Usage of Various Functions 7 52 c Program...
Page 183: ...Chapter 7 Usage of Various Functions 7 76 c Program...
Page 253: ...Chapter 8 Communication Functions 8 27 b When uses Ch 1 Built in RS 485...
Page 356: ...Appendix 1 System Definitions App1 9 6 Position Parameter...
Page 357: ...Appendix 1 System Definitions App1 10 7 High Speed Counter Parameter...







































































