























Chapter 6. Input and Output Specifications
6-13
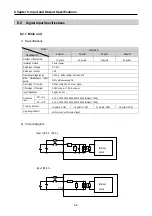
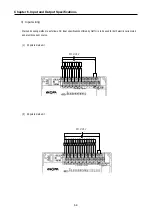
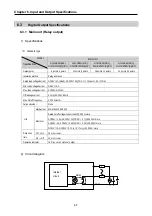
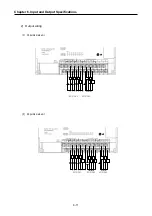
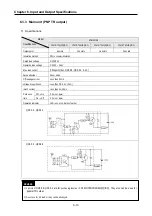
6.3.3 Main unit (PNP TR output)
1)
Specifications
Main Unit
Model
Specifications
G7M-DT20U(P)(/DC)
G7M-DT30U(P)(/DC)
G7M-DT40U(P)(/DC)
G7M-DT60U(P)(/DC)
Output point
8 points
12 points
16 points
24 points
Insulation method
Photo coupler insulation
Rated load voltage
DC12/24V
Operation load voltage
DC10.2 ~ 26.4V
Max. load current
0.5A/point (but, QX0.0.0, QX0.0.1 : 0.1A)
Surge absorber
Zener diode
Off leakage current
Less than 0.1mA
Voltage drop when on
Less than DC 0.3 V (0.1A)
Inrush current
Less than 4A, 10ms
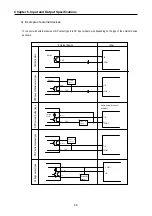
Off
→
On
0.2 ms or lower
Response
time
On
→
Off
0.2 ms or lower
Operation indicator
LED is on at on status of output
QX0.0.2 , QX0.0.3
QX0.0.0 , QX0.0.1
1) 4 points of
QX0.0.0~QX0.0.3 are for
positioning function
in G7M-DT20/30/40/60U(P)(/DC). They also can be used for
general TR output.
2) Do not use for AC load, or they can be destroyed.
REMARK
Summary of Contents for GLOFA G7M-DR20U
Page 28: ...Chapter 4 Names of Parts 4 3 2 G7M DRT60U N 3 G7M DT60U N 4 G7M DT60U P...
Page 29: ...Chapter 4 Names of Parts 4 4 5 G7M DR60U DC 6 G7M DRT60U N DC 7 G7M DT60U N DC...
Page 31: ...Chapter 4 Names of Parts 4 6 3 G7M DT40U N 4 G7M DT40U P 5 G7M DR40U DC...
Page 32: ...Chapter 4 Names of Parts 4 7 6 G7M DRT40U N DC 7 G7M DT40U N DC 8 G7M DT40U P DC...
Page 33: ...Chapter 4 Names of Parts 4 8 4 1 3 30 point main unit 1 G7M DR30U 2 G7M DRT30U N 3 G7M DT30U N...
Page 34: ...Chapter 4 Names of Parts 4 9 4 G7M DT30U P 5 G7M DR30U DC 6 G7M DRT30U N DC...
Page 36: ...Chapter 4 Names of Parts 4 11 2 G7M DRT20U N 3 G7M DT20U N 4 G7M DT20U P...
Page 37: ...Chapter 4 Names of Parts 4 12 5 G7M DR20U DC 6 G7M DRT20U N DC 7 G7M DT20U N DC...
Page 38: ...Chapter 4 Names of Parts 4 13 8 G7M DT20U P DC...
Page 159: ...Chapter 7 Usage of Various Functions 7 52 c Program...
Page 183: ...Chapter 7 Usage of Various Functions 7 76 c Program...
Page 253: ...Chapter 8 Communication Functions 8 27 b When uses Ch 1 Built in RS 485...
Page 356: ...Appendix 1 System Definitions App1 9 6 Position Parameter...
Page 357: ...Appendix 1 System Definitions App1 10 7 High Speed Counter Parameter...







































































