





























IPE300 series engineering VFD
Basic operation guidelines
-105-
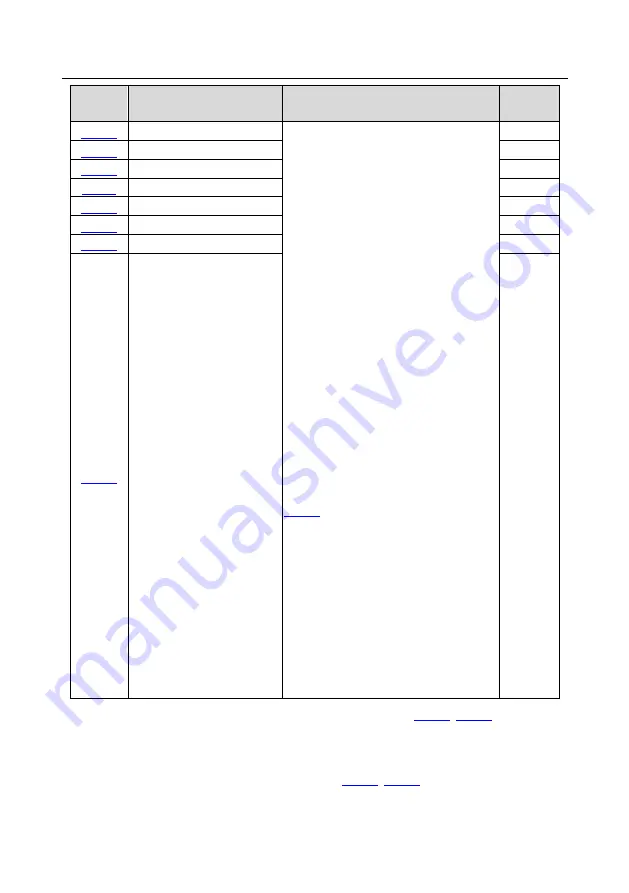
Function
code
Name
Description
Default
Bit 08 selection of CW 1
6: Fault reset (0: disable; 1: enable)
7: Jog forward (0: disable; 1: enable)
8: Jog reversely (0: disable; 1: enable)
9: Heartbeat reference (0: no heartbeat; 1:
The RUN command in control word 1 is
valid only when the heartbeat is enabled
and the bit is 1.)
10: Pre-exciting (0: disable; 1: enable)
11: DC braking (0: disable; 1: enable)
12: Drop control (0: disable; 1: enable)
13: Run forward (0: disable; 1: forward)
14: Run reversely (0: disable; 1: reverse)
15: Switch to the master (0: disable; 1:
switch to master)
16: Slave to master (0: disable; 1: switch to
slave)
17: Switch between speed control and
torque control (0: disable; 1: enable)
18: Run command to switch between local
and remote (0: remote; 1: Local. Select a
local mode based on the thousand bit of
19: Switch between motor groups (0: motor
group 1; 1: motor group 2)
20: Remote brake output (0: disable; 1:
Brake output relay is valid, corresponding
to output terminal 50: remote brake)
21: Reserved
22: Clear encoder pulse count value (0:
disable; 1: Set the present encoder pulse
count value to the value of P22.24)
23
–32: Reserved
7
Bit 09 selection of CW 1
8
Bit 10 selection of CW 1
9
Bit 11 selection of CW 1
0
Bit 12 selection of CW 1
0
Bit 13 selection of CW 1
0
Bit 14 selection of CW 1
0
Bit 15 selection of CW 1
0
Similarly, complete the programming of CW2, SW1, and SW2 through
5.5.17.3 Free programming of process data
Received PZD programming can be completed through
Summary of Contents for IPE300 Series
Page 1: ...IPE300 Series Engineering VFD...
Page 3: ......
Page 383: ...6 6 0 0 1 0 0 8 1 2 202106 V1 0...







































































