





























IPE300 series engineering VFD
Communication protocol
-284-
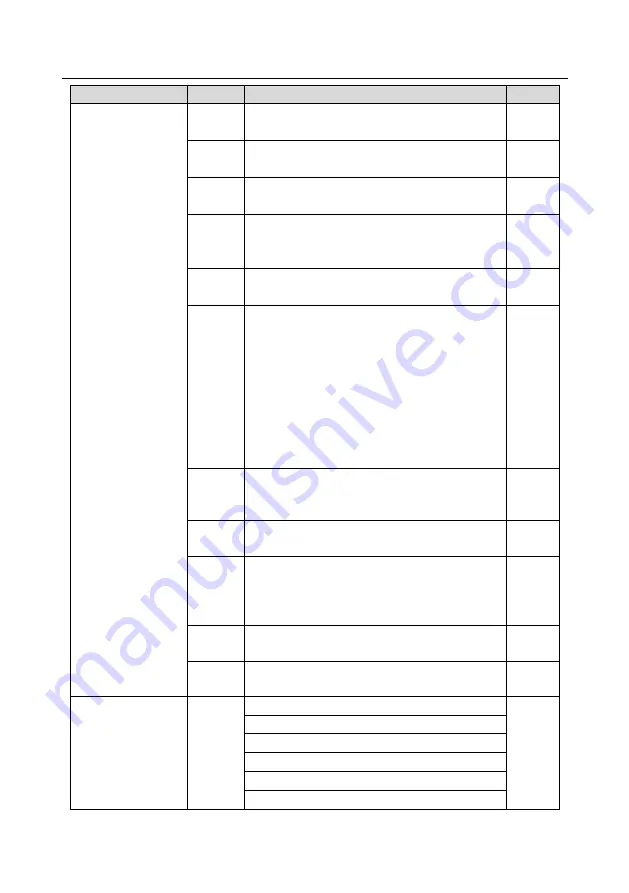
Function
Address
Data description
R/W
2004H
Torque setting (-3000
–3000, in which 1000
corresponds to 100.0% of the motor rated current)
R/W
2005H
Upper limit setting of forward running frequency
(0
–Fmax; unit: 0.01 Hz)
R/W
2006H
Upper limit setting of reverse running frequency
(0
–Fmax; unit: 0.01Hz)
R/W
2007H
Upper limit of the electromotive torque (0
–3000, in
which 1000 corresponds to 100.0% of the motor
rated current)
R/W
2008H
Braking torque upper limit. (0
–3000, in which 1000
corresponds to 100.0% of the VFD rated current)
R/W
2009H
Special CW
Bit0
–1=00: Motor 1 =01: Motor 2
Bit2=1 Enable speed/torque control switchover
=0: Disable speed/torque control switchover
Bit3=1 Clear electricity consumption data
=0: Keep electricity consumption data
Bit4=1
Enable
pre-excitation
=0:
Disable
pre-excitation
Bit5=1 Enable DC braking =0: Disable DC braking
R/W
200AH
Virtual input terminal command (0x000
–0x3FF)
Corresponding to S8/S7/S6/S5/HDIB/HDIA/S4/ S3/
S2/S1
R/W
200BH
Virtual output terminal command (0x00
–0x0F)
Corresponding to local RO2/RO1/HDO/Y1
R/W
200CH
Voltage setting (used when V/F separation is
implemented)
(0
–1000, 1000 corresponding to 100.0% of the
motor rated voltage)
R/W
200DH
AO setting 1 (-1000
–+1000, in which 1000
corresponding to 100.0%)
R/W
200EH
AO setting 2 (-1000
–+1000, in which 1000
corresponding to 100.0%)
R/W
VFD status word 1
2100H
0001H: Forward running
R
0002H: Reverse running
0003H: Stopped
0004H: Faulty
0005H: POFF
0006H: Pre-exciting
Summary of Contents for IPE300 Series
Page 1: ...IPE300 Series Engineering VFD...
Page 3: ......
Page 383: ...6 6 0 0 1 0 0 8 1 2 202106 V1 0...







































































