





























IPE300 series engineering VFD
Function parameter list
-198-
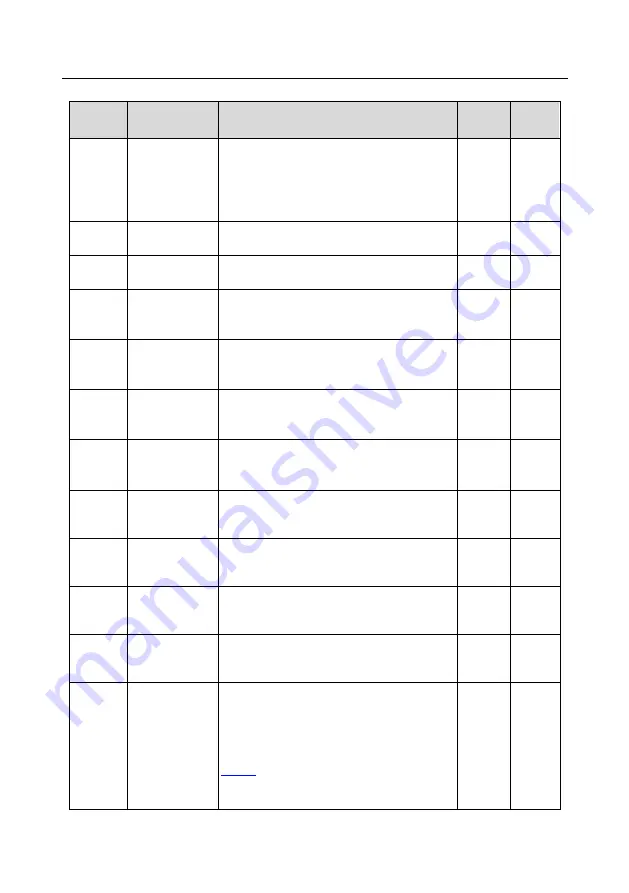
P18 group
––Status viewing in closed-loop control
Function
code
Name
Description
Default
Modify
P18.00
Actual frequency
of encoder
Used to indicate the actual-measured encoder
frequency. The value of forward running is
positive; the value of reverse running is
negative.
Range: -999.9
–3276.7Hz
0.0Hz
●
P18.01
Encoder position
count value
Encoder count value, quadruple frequency.
Range: 0
–65535
0
●
P18.02
Encoder Z pulse
count value
Corresponding count value of encoder Z pulse.
Range: 0
–65535
0
●
P18.03
High-order bit of
position
reference value
It is cleared after stop.
Setting range: 0
–30000
0
●
P18.04
Low-order bit of
position
reference value
It is cleared after stop.
Range: 0
–65535
0
●
P18.05
High-order bit of
position
feedback value
It is cleared after stop.
Setting range: 0
–30000
0
●
P18.06
Low-order bit of
position
feedback value
It is cleared after stop.
Range: 0
–65535
0
●
P18.07
Position
deviation
Deviation between the reference position and
actual running position.
Setting range: -32768
–32767
0
●
P18.08
Position of
position
reference point
Position of reference point of Z pulse when the
spindle stops accurately.
Range: 0
–65535
0
●
P18.09
Present position
setting of spindle
Present position setup when the spindle stops
accurately.
Setting range: 0
–359.99
0.00
●
P18.10
Present position
when spindle
stops accurately
Present position when the spindle stops
accurately.
Range: 0
–65535
0
●
P18.11
Encoder Z pulse
direction
Z pulse direction display. When the spindle
stops accurately, there may be a couple of
pulses’ error between the position of forward
and reverse orientation, which can be
eliminated by adjusting Z pulse direction of
or exchanging phase AB of encoder.
0: Forward
1: Reverse
0
●
Summary of Contents for IPE300 Series
Page 1: ...IPE300 Series Engineering VFD...
Page 3: ......
Page 383: ...6 6 0 0 1 0 0 8 1 2 202106 V1 0...







































































