





























9.
Troubleshooting
Fieldbus Communication
248
RCP6S
*
In the alarm code list, description of P6PC shows RCM-P6PC, P6AC shows RCM-P6AC and P6DC shows RCM-P6DC.
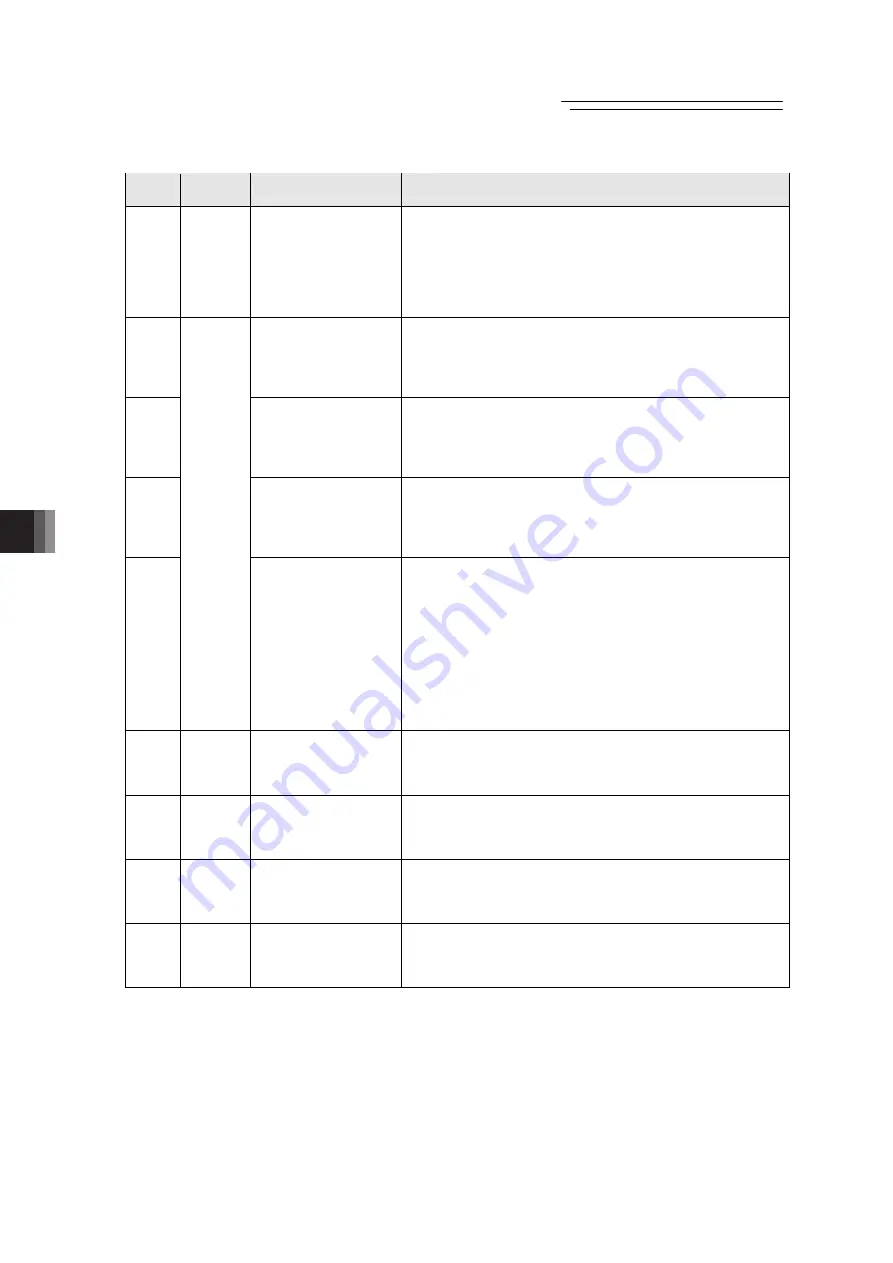
Alarm
Code
Alarm
Level
Alarm Name
Cause/Treatment
0F5
Operation
release
Nonvolatile memory
write verify error
Cause
: It is verified at the data writing process to the
non-volatile memory that the data inside the
memory and the data to be written are matched.
There was a mismatch detected in this process.
(Faulty nonvolatile memory.)
Treatment : When the error is caused even when the power is
re-input, please contact IAI.
0F6 Nonvolatile
memory
write timeout
Cause
: There is no response in the specified time duration
during the data writing to the non-volatile memory.
(Faulty nonvolatile memory.)
Treatment : When the error is caused even when the power is
re-input, please contact IAI.
0F8 Nonvolatile
memory
data destroyed
Cause
: Abnormal data was detected during the nonvolatile
memory check after starting. (Faulty nonvolatile
memory.)
Treatment : When the error is caused even when the power is
re-input, please contact IAI.
0FA
CPU error
The CPU operation is not normal.
Cause
: 1) Faulty CPU.
2) Malfunction due to noise.
Treatment : When the error is caused even when the power is
re-input, please contact IAI.
0FC
Cold start
Logic error
(Faulty component)
The controller is not operating properly.
Cause
: 1) Malfunction due to the effect of noise, etc.
2) Malfunction of peripheral circuit components.
Treatment : Turn the power OFF and reboot.
If the error occurs again, check for presence of
noise.
If a spare controller is available, replace the
problem controller with the spare controller. A
recurring error with the spare controller suggests
presence of noise.
If the cause cannot be identified, please contact IAI.
100 to
1FF
Message
Alarm on teaching tool [Refer to the Instruction Manual of teaching tool.]
200 to
2FF Operation
release
Alarm on teaching tool [Refer to the Instruction Manual of teaching tool.]
300 to
3FF
Cold start
Alarm on teaching tool [Refer to the Instruction Manual of teaching tool.]
800 to
8FF
-
Alarm on Gateway
[Refer to 9.3.1 Gateway Alarm Codes.]
ME0349-4B
Summary of Contents for RCM-P6AC
Page 2: ......
Page 9: ...Fieldbus Communication RCP6S ME0349 4B ...
Page 32: ...Fieldbus Communication 20 RCP6S ME0349 4B ...
Page 86: ...2 Wiring Fieldbus Communication 74 RCP6S ME0349 4B ...
Page 178: ...3 Operation Fieldbus Communication 166 RCP6S ME0349 4B ...
Page 184: ...4 Vibration Suppress Control Function Fieldbus Communication 172 RCP6S ME0349 4B ...
Page 192: ...6 Power saving Function Fieldbus Communication 180 RCP6S ME0349 4B ...
Page 196: ...7 Absolute Reset Fieldbus Communication 184 RCP6S ME0349 4B ...
Page 284: ......
Page 285: ......







































































