



























thus providing the advantage of knowing how performance should be optimized,
even during the first turbulent milliseconds of the fault period.
There are two types of CVTs from the function point of view, the passive and the
active type, which refers to the type of ferro-resonance suppression device that is
employed. The active type requires more rigorous filtering which will have a
negative impact on operate times. However, this will be evident primarily at higher
source impedance ratios (SIRs), SIR 5 and above, or close to the reach limit.
The IEC 60044-5 transient classification is of little or no use in relation to this. It is
not primarily the damping of transients that is important; it is the frequency content
of the transients that is decisive, i.e. how difficult it is to filter out the specific
frequency. So, even if two CVTs, one passive and the other active type, comply
with the same transient class, the active type requires more extensive filtering in
order to avoid transient overreach.
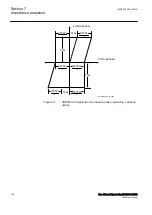
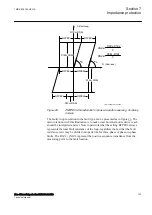
To avoid overreach and at the same time achieve fast operate times, a
supplementary circular characteristic is implemented. A circular characteristic
exists for every measuring loop and quadrilateral/mho characteristic. There are no
specific reach settings for this circular zone. It uses the normal quadrilateral/mho
zone settings to determine a reach that will be appropriate. This implies that the
circular characteristic will always have somewhat shorter reach than the
quadrilateral/mho zone.
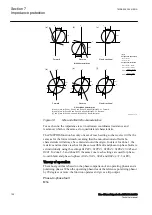
7.1.7.3
Phase-selection element
GUID-1E718907-C321-4041-B0ED-D55104B2C9B4 v5
The operation of the phase-selection element is primarily based on current change
criteria (i.e. delta quantities) with significantly increased dependability. To handle
this, there is also a phase selection criterion operating in parallel which bases its
operation only on voltage and current phasors.
This continuous criteria will, in the vast majority of cases, operate in parallel and
carry on the fault indication after the current change phase has ended. Only in some
particularly difficult faults on heavily loaded lines, the continuous criteria might
not be sufficient, for example, when the estimated fault impedance resides within
the load area defined by the load encroachment characteristic. In this case, the
indication will be restricted to a pulse lasting for one or two power system cycles.
The phase-selection element can, owing to the current change criteria, distinguish
faults with minimum influence from load and fault impedance. In other words, it is
not restricted by a load encroachment characteristic during the current change
phase. This significantly improves performance for remote phase-to-earth faults on
heavily loaded lines. One exception, however, are three-phase faults to which the
load encroachment characteristic always has to be applied in order to distinguish
fault from load.
Phase-to-phase-earth faults (also called double earth faults) will practically always
activate phase-to-phase zone measurements. Measurement in two phase-to-earth
loops at the same time is associated with so-called simultaneous faults: two earth
faults at the same time, one each on the two circuits of a double line, or when the
1MRK 505 394-UEN A
Section 7
Impedance protection
Line differential protection RED650 2.2 IEC
119
Technical manual
Summary of Contents for RED650
Page 1: ...RELION 650 SERIES Line differential protection RED650 Version 2 2 Technical manual...
Page 2: ......
Page 36: ...30...
Page 46: ...40...
Page 232: ...226...
Page 272: ...266...
Page 288: ...282...
Page 306: ...300...
Page 406: ...400...
Page 436: ...430...
Page 502: ...496...
Page 614: ...608...
Page 628: ...622...
Page 644: ...638...
Page 760: ...754...
Page 778: ...772...
Page 814: ...808...
Page 870: ...864...
Page 874: ...868...
Page 924: ...918...
Page 925: ...919...







































































