





























Note
Action
See
Filling, axes 2 and 3 on page 128
Refill the gearbox axes 2-3 with oil.
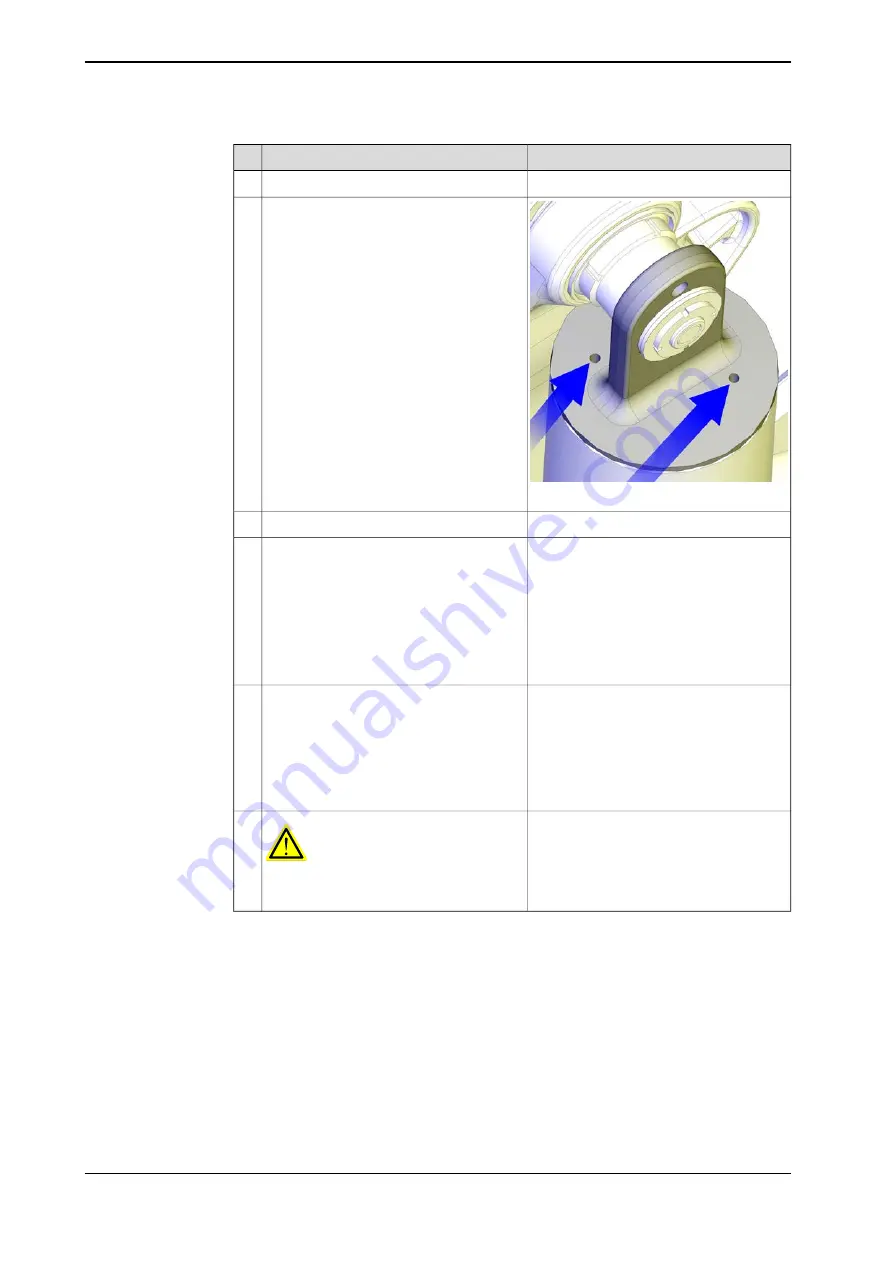
19
xx1000001111
Remove the screws that unload the balan-
cing device and put back the plastic
screws.
20
Remove the lock screw from the lower arm.
21
Axis 2
Run the axes 2 and 3 to a position where
the remaining screws in the lower arm can
be fitted.
22
M12x60 quality 12.9 Gleitmo (6 pcs)
•
Tightening torque: 120 Nm.
M16x90 quality 12.9 Gleitmo (2 pcs)
•
Tightening torque: 300 Nm.
Axis 3
M12x60 quality 12.9 Gleitmo
•
Tightening torque: 120 Nm.
Pendulum Calibration is described in
Op-
erating manual - Calibration Pendulum
,
enclosed with the calibration tools.
Recalibrate the robot.
23
Axis Calibration is described in
with Axis Calibration method on page 315
General calibration information is included
in section
DANGER
Make sure all safety requirements are met
when performing the first test run.
24
298
Product manual - IRB 660
3HAC025755-001 Revision: W
© Copyright 2006-2020 ABB. All rights reserved.
4 Repair
4.7.2 Replacing the gearbox, axes 2- 3
Continued
Summary of Contents for IRB 660
Page 1: ...ROBOTICS Product manual IRB 660 ...
Page 8: ...This page is intentionally left blank ...
Page 332: ...This page is intentionally left blank ...
Page 352: ...This page is intentionally left blank ...
Page 354: ...This page is intentionally left blank ...
Page 360: ......
Page 361: ......