

























Description
Revision
This revision includes following updates:
•
Added index words throughout the manual.
•
Inspection method of oil level in gearbox, axis 6, is changed, see
Inspecting, oil level gearbox axis 6 on page 101
•
Position numbers in figure corrected, see
.
•
Removed information about lubricating attachment screws, removed
tightening torque and screw dimension for axis 2 and 3 and added
screw dimension for axis 1, see
Inspecting the additional mechan-
•
Changed tightening torque of fork lift adapters, from 60 Nm to 270
Nm, see
Lifting robot with fork lift on page 52
.
•
Changed article numbers of robot power cables, see
.
•
Information about restricting and extending the working range of
axis 1 is now separated, see
Mechanically restricting the working
and the new section
range, axis 1 (option 561-1) on page 80
. Also added signal about
option 561-1 in section
Inspecting the axis-1 mechanical stop pin
•
Added detailed information about how to decommission the balan-
cing device, see
Decommissioning of balancing device on page 336
•
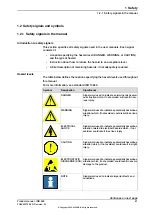
Added new safety symbols, see
Safety symbols on manipulator la-
.
F
This revision includes the following updates:
•
A new block, about general illustrations, added in section
read the product manual on page 18
.
•
Added a KM10 socket to the list of required equipment and the in-
structions when replacing the lower rod, see section
linkage - lower rod on page 205
. The tool is also added to the list of
Special tools in the Reference chapter.
•
Added instructions for securing parallel arm and lower arm to each
other before removing the lower arm, see
.
•
Added guide sleeves to hold the axes 2/3 sealing in place when re-
fitting the lower arm, see
Replacing the complete lower arm on
.
•
Made minor corrections and improvements in the complete instruc-
tion for how to replace the lower arm system, see
complete lower arm on page 221
.
•
Made minor corrections and improvements in the complete instruc-
tion for how to replace the parallel arm, see
•
Made minor corrections and improvements in the complete instruc-
tion for how to replace the axis 1 gearbox, see
.
•
Some general tightening torques have been changed/added, see
updated values in
.
•
Added information about batteries.
G
Continues on next page
12
Product manual - IRB 660
3HAC025755-001 Revision: W
© Copyright 2006-2020 ABB. All rights reserved.
Overview of this manual
Continued
Summary of Contents for IRB 660
Page 1: ...ROBOTICS Product manual IRB 660 ...
Page 8: ...This page is intentionally left blank ...
Page 332: ...This page is intentionally left blank ...
Page 352: ...This page is intentionally left blank ...
Page 354: ...This page is intentionally left blank ...
Page 360: ......
Page 361: ......