





























Note
Action
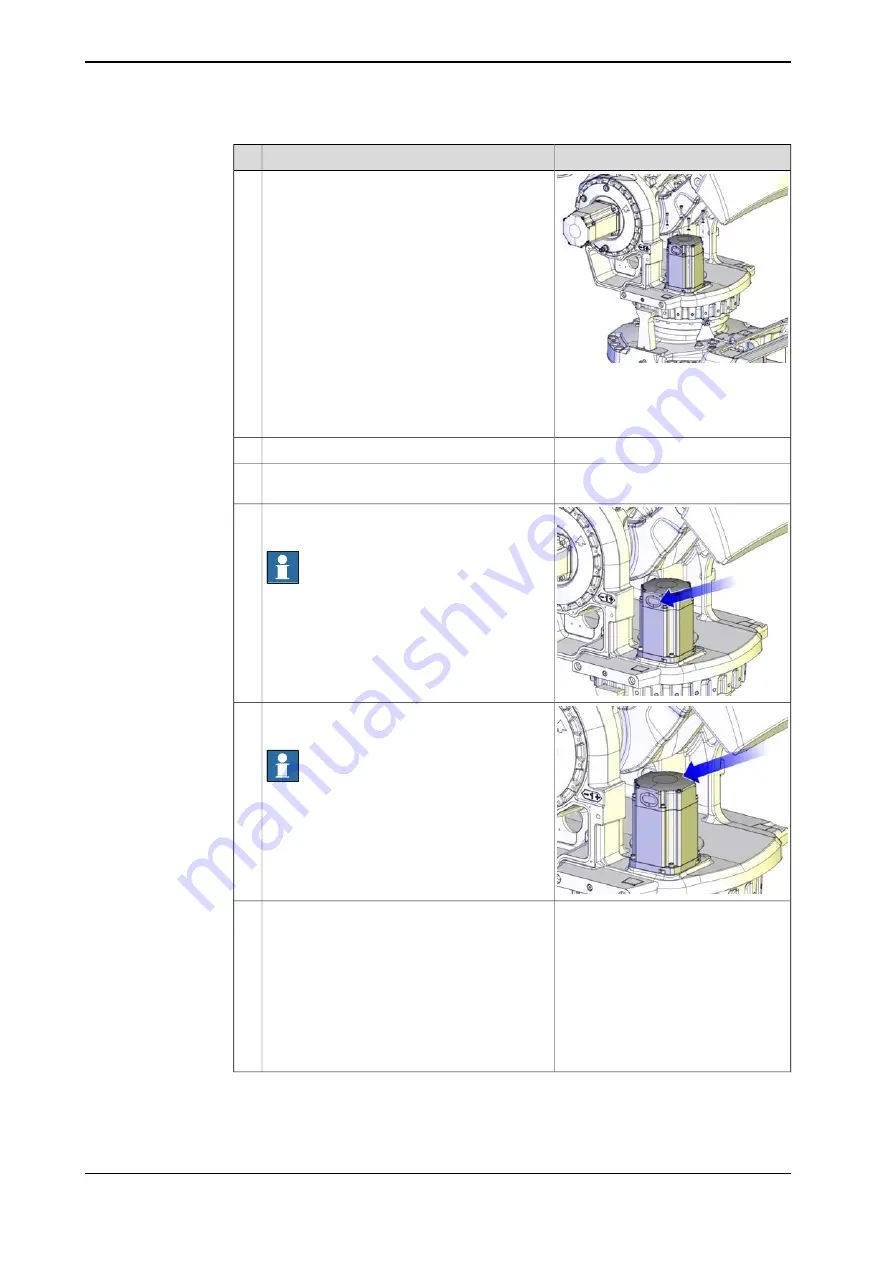
Secure the motor with its four
attachment
screws
and plain
washers
. Use the bits exten-
sion.
5
Attachment screws
:
•
M10x40 quality 12.9 Gleitmo
Tightening torque
:
•
50 Nm
Disconnect the brake release voltage.
6
Reconnect all connectors beneath the motor
cover.
7
Refit the
cable gland cover
at the cable exit with
its attachment screws.
Note
Make sure the cover is tightly sealed!
Replace gasket if damaged.
8
Refit the
motor cover
with its attachment
screws.
Note
Make sure the cover is tightly sealed!
9
Pendulum Calibration is described in
Operating manual - Calibration Pendu-
lum
, enclosed with the calibration
tools.
Recalibrate the robot!
10
Axis Calibration is described in
rating with Axis Calibration method on
page 315
General calibration information is in-
cluded in section
Continues on next page
256
Product manual - IRB 660
3HAC025755-001 Revision: W
© Copyright 2006-2020 ABB. All rights reserved.
4 Repair
4.6.1 Replacing motor, axis 1
Continued
Summary of Contents for IRB 660
Page 1: ...ROBOTICS Product manual IRB 660 ...
Page 8: ...This page is intentionally left blank ...
Page 332: ...This page is intentionally left blank ...
Page 352: ...This page is intentionally left blank ...
Page 354: ...This page is intentionally left blank ...
Page 360: ......
Page 361: ......