





























Goodrive350-19 series VFD for crane
Commissioning guidelines
-113-
Example
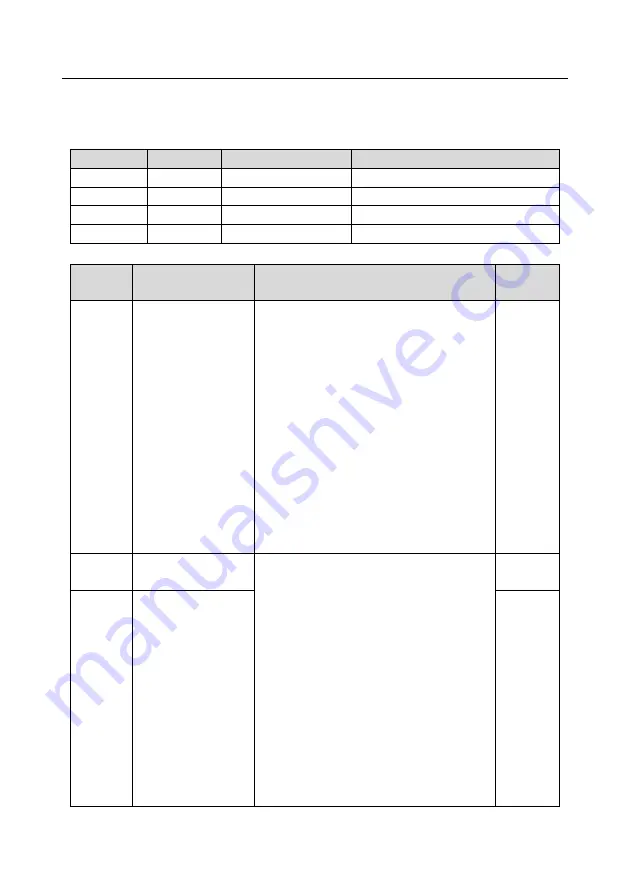
If S1 is set to have terminal function 35 (for switching from motor 1 to motor 2) and S2 is set to have
terminal function 88 (for switching from motor 1 to motor 3), there are four types of combination:
S1 status
S2 status
Present motor status
Contactor switch status
OFF
OFF
Switched to motor 1
KM1 closed, KM2 opened, KM3 opened
ON
OFF
Switched to motor 2
KM1 opened, KM2 closed, KM3 opened
OFF
ON
Switched to motor 3
KM1 opened, KM2 opened, KM3 closed
ON
ON
Switched to motor 2
KM1 opened, KM2 closed, KM3 opened
5.15.3 Motor and macro switchover parameters
Function
code
Name
Description
Default
P08.31
Channel for switching
between motor 1 and
motor 2
0x00
–0x14
LED Ones place: Switchover channel
0: Terminal
1: Modbus communication
2: PROFIBUS/CANopen/DeviceNet
communication (same as the above)
3: Ethernet communication (same as the
above)
4: EtherCAT/Profinet communication
5: 216 communication
LED tens place: indicates whether to enable
switchover during running
0: Disable
1: Enable
0x00
P90.00
Hoisting application
macro setting
0
–15
0: Common application mode
1: Lifting mode 1 (in open-loop vector control)
2: Lifting mode 2 (in closed-loop vector control)
3: Horizontal moving mode (in space voltage
vector control)
4: Tower crane slewing mode
5: Conical motor application mode
6: User-defined application macro 1
7: User-defined application macro 2
8: User-defined application macro 3
9: Lifting mode 3 (in space voltage vector
control)
10: Construction elevator mode
0
P90.01
Terminal-switched
application macro
setting
0







































































