





























78
ADV200 WA • Quick start up guide - Specification and installation
9. If the motor still rotates with a reference of zero, eliminate the condition by
self-tuning the analog input offset: set the input signal to its minimum value
and set 1 for
An inp 1 offset tune
(PAR: 1506).
10. To reverse the direction of rotation, keep closed the
FR forward src (PAR
1042)
contact (terminals S3 – 8) and close the
FR reverse src (PAR 1044)
contact (terminals S3 – 9). The motor will start the deceleration ramp until
reaching the zero speed, after which it will reverse the direction of rotation and
move to the set speed with the acceleration ramp.
11. To stop the drive, open the
FR forward src (PAR 1042)
contact (terminals
S3 – 8): the motor will start the deceleration ramp and the speed will move to
zero, but the motor will remain magnetized. To interrupt magnetization, open
the
Enable
contact (terminals S3 – 7).
12. If the
Enable
contact is opened while the motor is running, the inverter bridge
is immediately disabled and the motor stops due to inertia.
Note !
Once you have verified the correct operation of the drive-motor system, the application can be cus-
tomized by changing some of the parameters.
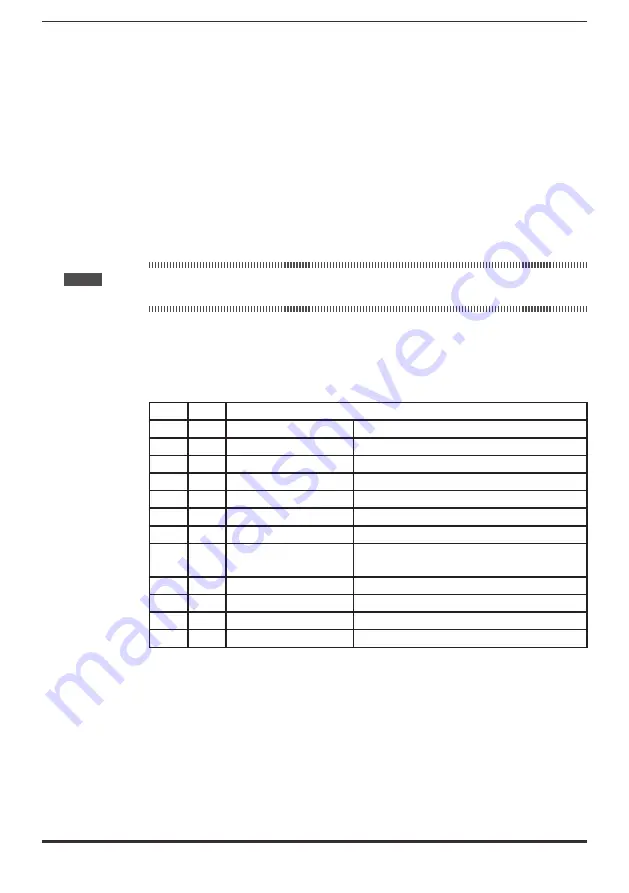
• Summary of parameters
The parameters used and/or modified in the Startup Wizard procedures are listed
below.
Menu PAR
Description
16.1
2000
Rated voltage
Motor rated voltage
16.2
2002
Rated current
Motor rated current
16.3
2004
Rated speed
Motor rated speed
16.4
2006
Rated frequency
Motor rated frequency
16.5
2008
Pole pairs
Number of pole pairs
16.6
2010
Rated power
Motor rated power
16.9
2022
Autotune rotation
Self-tuning with motor rotating
16.10 2024
Autotune still
Self-tuning with motor at stand-still or coupled
to the load
5.22
680
Full scale speed
Maximum speed setting
6.1
700
Acceleration time 0
Acceleration time 0
6.2
702
Deceleration time 0
Deceleration time 0
4.1
550
Save parameters
Save parameters in the non-volatile memory
Proceed to step 8.







































































