


























7 Motion Parameters
7.3.3 Axis Type Selection
7-48
7.3.3 Axis Type Selection
There are two types of position control:
Finite length position control: Return and other operations are performed only within a specified range, i.e.,
within a prescribed positioning interval.
Infinite length position control: Used for moving in one direction only.
• Resets the position to 0 after one rotation.
• Moves in one direction only, without resetting position after one rotation.
The axis type selection sets which of these types of position control is to be used. The settings for the Axis Type
Selection are listed in the following table.
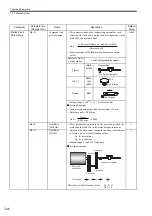
7.3.4 Position References
The target position value for position control is set for the Position Reference Setting (motion setting parameter
OL
1C). There are two methods that can be set for using the Position Reference Setting: Directly setting the
coordinate of the target position value as an absolute value or adding the moving amount from the previous com-
mand position as a incremental value.
The following table lists the parameters relating to position references.
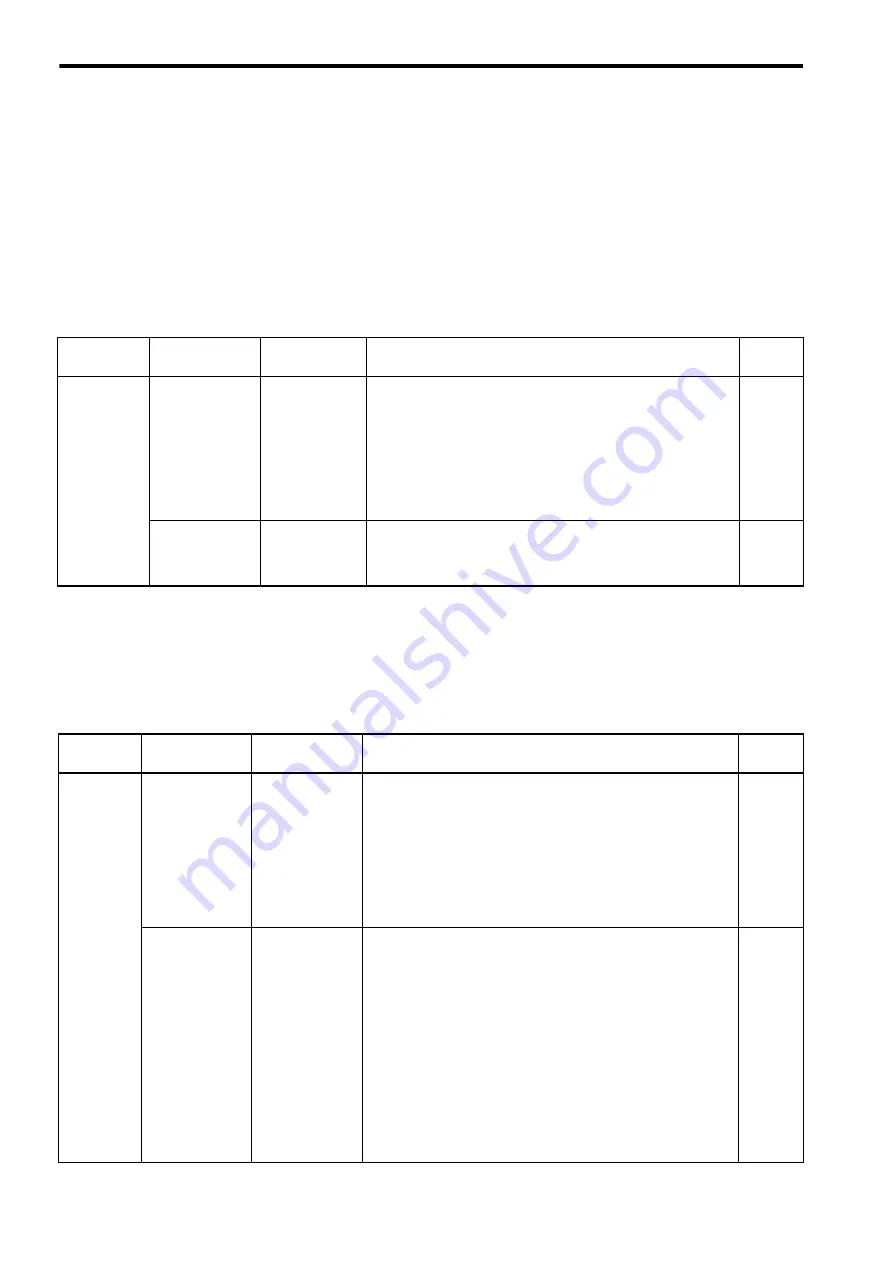
Parameter
Type
Parameter No.
(Register No.)
Name
Description
Default
Value
Motion Fixed
Parameters
No.1, bit 0
Function
Selection 1,
Axis Type
Specify the position control method for the controlled axis.
0: Finite Length Axis:
Set a finite length axis if control is performed within a limited
length or for an axis that uses infinite length control in one
moving direction only without resetting the position every
rotation.
1: Infinite Length Axis:
Set an infinite length axis for an axis that uses infinite length
control while resetting the position every rotation.
0
No.10
Maximum Value
of Rotary
Counter (POS-
MAX)
Set the reset position of the position data when an infinite length
axis has been set for the axis type.
360000
Parameter
Type
Parameter No.
(Register No.)
Name
Description
Default
Value
Motion
Setting
Parameters
OB
095
Position
Reference Type
Specify the type of position data.
0: Incremental Addition Mode
Adds the present moving amount value to the previous value of
OL
1C and sets the result in OL
1C
1: Absolute Mode
Sets the coordinate of the target position in OL
1C.
Note:
• Always set to 0 when using a motion program.
• Always set to 0 when using an infinite length axis.
0
OL
1C
Position
Reference Setting
Set the position data.
• Incremental Addition Mode (OB
095 = 0)
The moving amount (incremental distance) specified this time
will be added to the previous value of OL
1C.
OL
1C
←
Previous OL
1C + Incremental distance
Example:
If a travel distance of 500 is specified and the previous value of
OL
1C is 1000, the following will occur:
OL
1C
←
1000 + 500 = 1500
• Absolute Mode (OB
095 = 1)
The coordinate value of the target position is set.
Example:
Set 10000 to move to a coordinate value of 10000
OL
1C
←
10000
0







































































