























7 Motion Parameters
7.2.2 Motion Setting Parameter Details
7-20
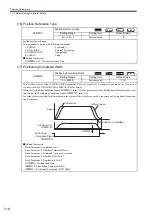
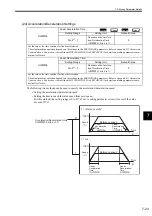
(20) Position Complete Timeout
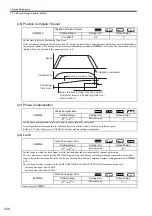
(21) Phase Compensation
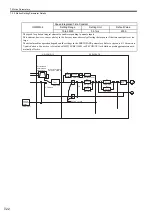
(22) Latch
OW
26
Position Complete Timeout
Setting Range
Setting Unit
Default Value
0 to 65535
ms
0
Set the time to detect a Positioning Time Over.
If the Positioning Completed bit does not turn ON within the time set here after reference pulses have been distributed dur-
ing position control, a Positioning Time Over alarm (monitoring parameter IB
046) will occur. The completion of posi-
tioning will not be checked if this parameter is set to 0.
OL
28
Phase Compensation
Setting Range
Setting Unit
Default Value
−
2
31
to 2
31
−
1
Reference unit
0
Set the phase compensation in reference units for phase reference commands.
Use this parameter to compensate for reference pulses in control systems with lower rigidity or gain.
Refer to
8.25 Phase References (PHASE)
for details on phase reference commands.
OL
2A
Latch Zone Lower Limit
Setting Range
Setting Unit
Default Value
−
2
31
to 2
31
−
1
Reference unit
−
2
31
Set the range in which the latch signal is valid (position from the zero position) for external positioning.
The set value here is written to the SERVOPACK parameters each time an external positioning command is executed as
long as the latch zone is enabled in the Latch Zone Enabled bit in Motion Command Options (setting parameter OW
09,
bit 4).
The latch zone setting is supported for SGDS SERVOPACKs for MECHATROLINK-II communication only.
Latching area upper limit: Pn820
Latching area lower limit: Pn822
OL
2C
Latch Zone Upper Limit
Setting Range
Setting Unit
Default Value
−
2
31
to 2
31
−
1
Reference unit
2
31
−
1
Same as for OL
2A.
Position
Phase
Speed
Torque
Speed
Position Error
Positioning Completed Width
Distribution completed
Positioning
Time Over
When this time is longer than the Position
Complete Timeout, a Positioning Time Over
alarm will occur.
Position
Phase
Speed
Torque
Position
Phase
Speed
Torque
Position
Phase
Speed
Torque







































































