





























11 SVR Virtual Motion Module
11.3.2 Motion Command Details
11-18
11.3.2 Motion Command Details
Basically, the SVR provides functions to loop from a Motion Command (OW
08) to the Servo Command
Type Response (IW
08).
For positioning-related motion commands, the SVR updates position information toward the final target position
using a positioning function.
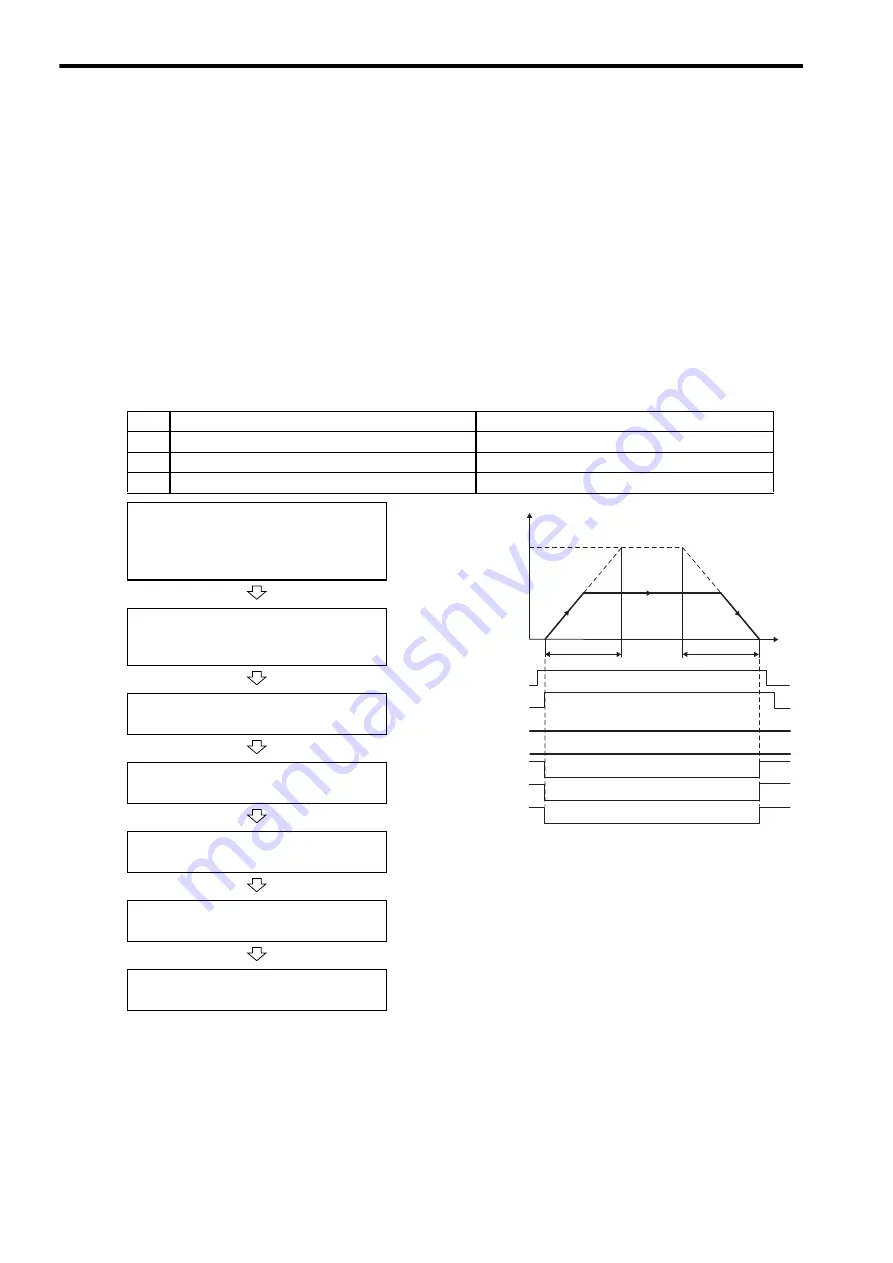
(1) Positioning (POSING)
The POSING command positions the axis to the target position using the specified target position and speed.
Parameters related to acceleration and deceleration are set in advance.
The speed and target position can be changed during operation. When the target position is changed so that there
is not sufficient deceleration distance or after the new target position has already been passed, the system will
first decelerate to a stop and then reposition according to the new target position.
(a) Operating Procedure
* If the Position Reference Type (OB
095) is set for an absolute mode, the target position can be set
before executing the command.
Note: The following position information is updated during command execution.
• Machine Coordinate Target Position (TPOS) (IL
OE)
• Target Position (CPOS) (IL
10)
• Machine Coordinate System Position (MPOS) (IL
12): MPOS is always equal to CPOS.
• Machine Coordinate Feedback Position (APOS) (IL
16): APOS is always equal to CPOS.
No.
Execution Conditions
Confirmation Method
1
There are no alarms.
Both IL
02 and IL
04 are 0.
2
The Servo ON condition.
IB
001 is ON.
3
Motion command execution has been completed.
IW
08 is 0 and IB
090 is OFF.
Set the motion setting parameters.
• Positioning Speed: OL
10
• Acceleration/Deceleration Filter Type:
OW
03
• The target position can be changed while the axis is moving.
• The positioning speed can be changed while the axis is moving.
• Set OB
090 to 1 to hold the command.
• Set OB
x091 to 1 or execute the NOP motion command to
abort the command.
Execute the positioning (POSING) motion
command.
• Set OW
08 to 1.
Set the target position.
• Target Position Setting: OL
1C*
Positioning starts.
• IW
08 will be 1 during positioning.
Position proximity reached.
• IB
0C3 will turn ON.
Positioning completed.
• IB
0C1 will turn ON.
Execute NOP motion command.
• Set OW
08 to 0.
Linear acceleration time
Linear deceleration time
Feed speed
Rated speed
100%
0
Speed (%)
Time (t)
OW
08 = 1 (POSING)
IW
08 = 1 (POSING)
IB
090 (BUSY)
IB
098 (COMPLETE)
IB
0C0 (DEN)
IB
0C1 (POSCOMP)
IB
0C3 (NEAR)
Position
Reference







































































