





























Robotiq CN C M achine Tending Kit Instruction M anual
5.10.1. Adding a Collision Detection Node
l
On the Teach Pendant, tap the New button to create a program or the Open button to load a program
l
From the Installation tab:
1. Go to the Installation tab and tap the URCaps submenu
2. Select Force Copilot.
3. Tap the Configuration tab to edit it
l
From the Program tab:
1. Tap the URCaps button in the navigation pane on the left
2. Select Collision Detection
3. Tap the Collision Detection node to edit it
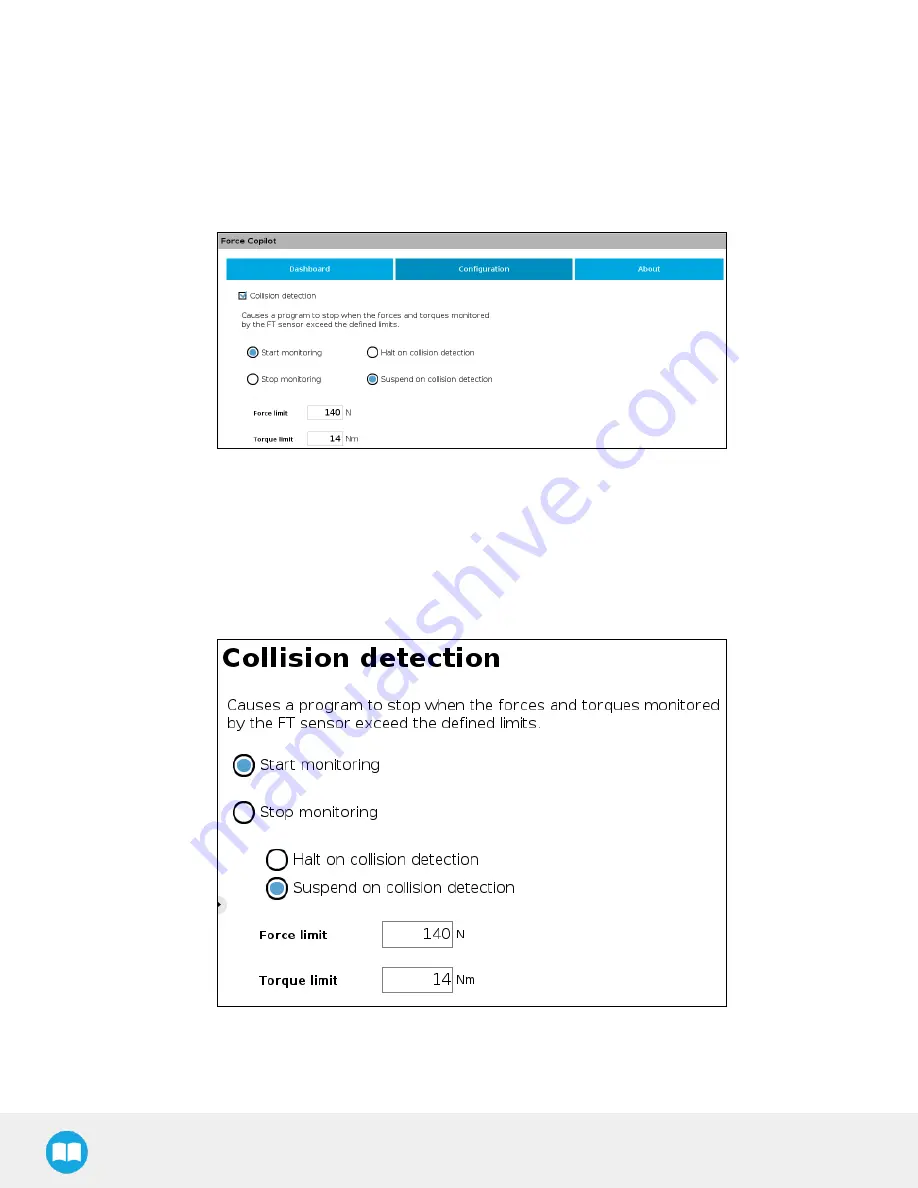
You can either choose to halt (stop) or suspend (pause) the program when a collision is detected. The forces and torques
monitored in the collision detection node are the ones measured by the embedded sensor. Thus, any forces or torques applied to
the robot arm will not be detected. Only those applied to the end-of-arm tooling are monitored.
The Collision Detection feature in the Inst allat ion tab can be configured to start the monitoring upon every robot program start. On
the other hand, the Collision Detection node in the Program tab starts a thread that runs in parallel with the rest of the robot program. If
the Stop monitoring option is selected in the Collision Detection node, the thread stops and the program continues without monitoring
the force or the torque.
84
Summary of Contents for CNC Machine Tending Kit
Page 2: ...Robotiq CNC Machine Tending Kit Instruction Manual 2...
Page 13: ...Robotiq CNC Machine Tending Kit Instruction Manual Fig 1 11 Wrist Camera hardware 13...
Page 139: ...Robotiq CNC Machine Tending Kit Instruction Manual 1 3 3 IngressProtection Certificate 139...
Page 141: ......
Page 143: ...Robotiq CNC Machine Tending Kit Instruction Manual 1 5 2 IngressProtection Certificate 143...