
























10 | Ottobock
3R106, 3R106=KD, 3R106=ST, 3R106=HD
Trikotschlauch 623T3 gezogen und oben ringförmig abgebunden, damit nach dem Aufbringen
von 2 Lagen Carbonfasergewebe 616G12 über den Armen des Adapters 4G70 die zweite Lage
Perlon-Trikotschlauch 623T3 das Carbonfasergewebe als Zwischenschicht hat. Jetzt wird noch
einmal mit Glasgeflechtschlauch 616G13 (wie unter Punkt 4.3.1.1 beschrieben) abgestuft ver
-
stärkt. Zuletzt 2 Lagen Perlon-Trikotschlauch 623T3 überziehen. Das Laminieren erfolgt ebenfalls
wie beim ersten Guss.
Achtung!
Ein Abweichen von den Verarbeitungshinweisen und den empfohlenen Materialien für die
Laminierung des Eingussankers kann zum Lockern und zum Bruch des Adapters führen.
Achtung!
Die Gewindestifte (Abb. 1, Pos. 4 u. 4a) nach der Montage mit dem Drehmomentschlüs-
sel 710D1 festziehen. Zur Anprobe: Die Gewindestifte 506G3 auf
10 Nm
anziehen. Zur
Fertigstellung: Die Gewindestifte 506G3 mit Loctite 636K13 sichern und auf
10 Nm
vorziehen, anschließend Montageanzugsmoment
15 Nm
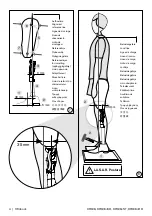
4.3.2 Justieren des Kniegelenkes während der Gehprobe
Der Übergang zur Beugebewegung erfolgt wie bei den anderen polyzentrischen Konstruktionen
durch Ballenkontakt.
Aufbau, Fußkonstruktion, Stumpfverhältnisse, Aktivität des Patienten beeinflussen die Eigenschaften
des Kniegelenkes. Ebenso wirken Fußgewicht und Unterschenkellänge als Pendelmasse. Beim
Probegehen sollten die ersten Versuche mit der Grundeinstellung vorgenommen und die Funktion
dem Patienten erklärt werden.
Das Kniegelenk wird in einer Grundeinstellung für die ersten Gehversuche geliefert.
Vor Veränderungen der werkseitigen Einstellung sind folgende Hinweise und Anweisungen
unbedingt zu beachten:
4.3.2.1 Standphasensicherung über Gelenkposition
Polyzentrische Gelenke werden in der Schrittvorlage bei Absatzkontakt stabil.
Ausschlaggebend für die Einleitung der Beugung ist die Position des Gelenkes und damit die
Lage des Momentan-Drehpunktes.
Standsicherung
zu groß
(Beugung kann nur schwer eingeleitet werden) =
Momentan-Drehpunkt zu weit dorsal = Gelenk über Justierschrauben nach vorn kippen.
Standsicherung
zu klein
(Patient knickt ein) = umgekehrt vorgehen.
Die Standphasensicherheit bzw. die Einleitung der Beugung hängt beim 3R106=KD und 3R106=ST
von der Positionierung des Eingußankers am Schaft ab (siehe Aufbau). Nachträgliche Justierungen
sind am oberen (proximalen) Gelenkanschluß nicht möglich.
4.3.2.2 Einstellen der Schwungphase
Die pneumatische Schwungphasensteuerung gestaltet das Gangbild harmonischer. Dabei vermei-
den die Bewegungswiderstände ein zu weites Durchschwingen des Prothesenunterschenkels in der
Beugung und gewährleisten eine gedämpfte Streckung. Das Fußgewicht und die Unterschenkellänge
haben als Pendelmasse ebenso Einfluss auf das Gangbild wie die Gewohnheiten des Patienten.
Vor der Veränderung der werkseitigen Einstellung sind folgende Anweisungen unbedingt zu beachten:
Im Lieferzustand ist die Ventilschraube (Abb. 4, E) für die Dämpfung in Extensionsrichtung
maximal herausgedreht (auf den geringsten Widerstand eingestellt) und die Ventilschraube (Abb. 4, F)
für die Dämpfung in Flexionsrichtung 2 Umdrehungen geschlossen.
Summary of Contents for 3R106
Page 3: ...Ottobock 3 3R106 3R106 KD 3R106 ST 3R106 HD 3 4 2 1 3 4 2 5 7 7a 6...
Page 133: ...Ottobock 133 3R106 3R106 KD 3R106 ST 3R106 HD 4 3 2 1 3R106 KD 3R106 ST 4 3 2 2 4 E 4 F F 4...
Page 152: ...152 Ottobock 3R106 3R106 KD 3R106 ST 3R106 HD 4 6 300 3 5 5 6 6 1 6 2 EU 2017 745 CE...
Page 159: ...Ottobock 159 3R106 3R106 KD 3R106 ST 3R106 HD 519L5 4 6 300 5 6 6 1 6 2 CE 2017 745 CE...
Page 160: ...160 Ottobock 3R106 3R106 KD 3R106 ST 3R106 HD...
Page 161: ...Ottobock 161 3R106 3R106 KD 3R106 ST 3R106 HD...







































































