





























7
Contr
oller system settings
7-22
NOTE
Input the OUT valid position with the 0 to 9 keys, "." key, and "-" key. When the value input with the keys is a real
number (numeric value including a period), the unit is converted into the pulse value.
■
Arch pulse 1
‹
ARCHP1
›
Arch pulse 2
‹
ARCHP2
›
This parameter sets the overlap area of the arch-specified axis and other axis movement when executing the arch motion
that is an option of the PTP motion. When this parameter is initialized, "9999999" is set.
The smaller the value, the larger the overlap area during axis movement. As a result, the movement execution time can
be reduced.
The value whose unit of the selected axis setting value was converted is shown.
NOTE
Input the arch pulse 1 and arch pulse 2 with the 0 to 9 keys, "." key, and "-" key. When the value input with the
keys is a real number (numeric value including a period), the unit is converted into the pulse value.
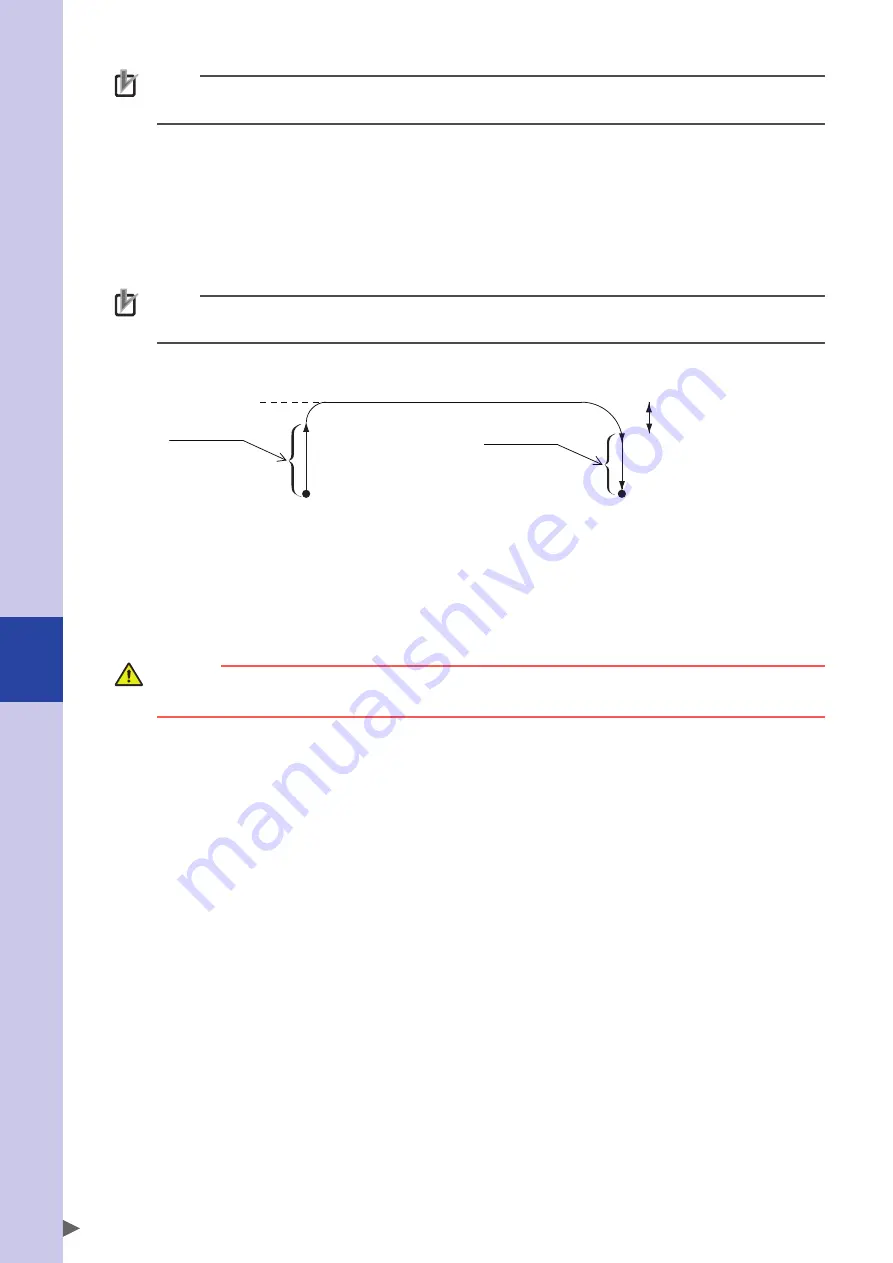
Arch pulse
Overlap area
Arch-specified axis = 0
Current position
Target position
2. Other axes movement
3. Arch-specified axis movement
Arch pulse 1
Arch pulse 2
1. Arch-specified axis movement
1. The arch-specified axis starts moving to the position specified by the option. ("1" shown in the figure above)
2. When the arch-specified axis moves arch pulse 1 value or more, other axes move to their target positions. ("2" shown
in the figure above)
3. The arch-specified axis moves to the target position so that the remaining distance becomes arch pulse 2 when the
movement of other axes is completed. ("3" shown in the figure above)
4. When all axes enter the OUT valid position range, the command is completed.
CAUTION
The tracking of the arch motion may vary depending on the movement speed. Check the interference check at
actual robot operation speed.
■
Push speed
‹
PSHSPD
›
This parameter sets the movement speed rate in 1 to 100 [%] at executing PUSH statement.
•
Neither "S" nor "DS" is set as an option in the PUSH statement:
Max. speed of a robot (mm/s or deg./s) x Pushing movement speed (%) x Auto. movement speed (%)
•
"S" is set as an option in the PUSH statement:
Max. speed of a robot (mm/s or deg./s) x Pushing movement speed (%) x Auto. movement speed (%) x Program movement speed (%)
•
"DS" is set as an option in the PUSH statement:
Max. speed of a robot (mm/s or deg./s) x Pushing movement speed (%) x Movement speed of an axis (%)
* Refer to the YRCX programming manual for details regarding the option settings of the PUSH statement.
When this parameter is initialized, "10" is set.
■
Push force
‹
PSHFRC
›
This parameter sets the pushing thrust in -1000 to 1000 [%] at executing PSHFRC statement.
Actual pushing thrust is as follows:
•
Rated thrust x <pushing thrust> / 100
When this parameter is initialized, "100" is set.
■
Push time
‹
PSHTIME
›
This parameter sets the pushing time within 0 to 32767 [ms] at executing PSHTIME statement. Pushing time is counted in
conditions as follows:
•
The pushing time reaches the specified value.
•
The axis movement speed lowers the pushing detection speed threshold.
When this parameter is initialized, "1000" is set.
Summary of Contents for R6YXC1000
Page 1: ...7 6HULHV DW 1R 1 5 5RERW RQWUROOHU 86 5 6 0 18 6 5 5RERWV 5 6HULHV...
Page 2: ......
Page 10: ......
Page 40: ......
Page 42: ......
Page 46: ......
Page 48: ......
Page 54: ......
Page 56: ......
Page 64: ......
Page 80: ......
Page 82: ......
Page 102: ......
Page 108: ......
Page 110: ......
Page 136: ......
Page 168: ......
Page 170: ......
Page 174: ...8 Periodic inspection 8 4...
Page 176: ......
Page 182: ......
Page 256: ......
Page 258: ......
Page 259: ......
Page 260: ...DW 1R 1 XWKRUL HG LVWULEXWRU 3ULQWHG LQ XURSH...