





























4.2 Main Commands
86
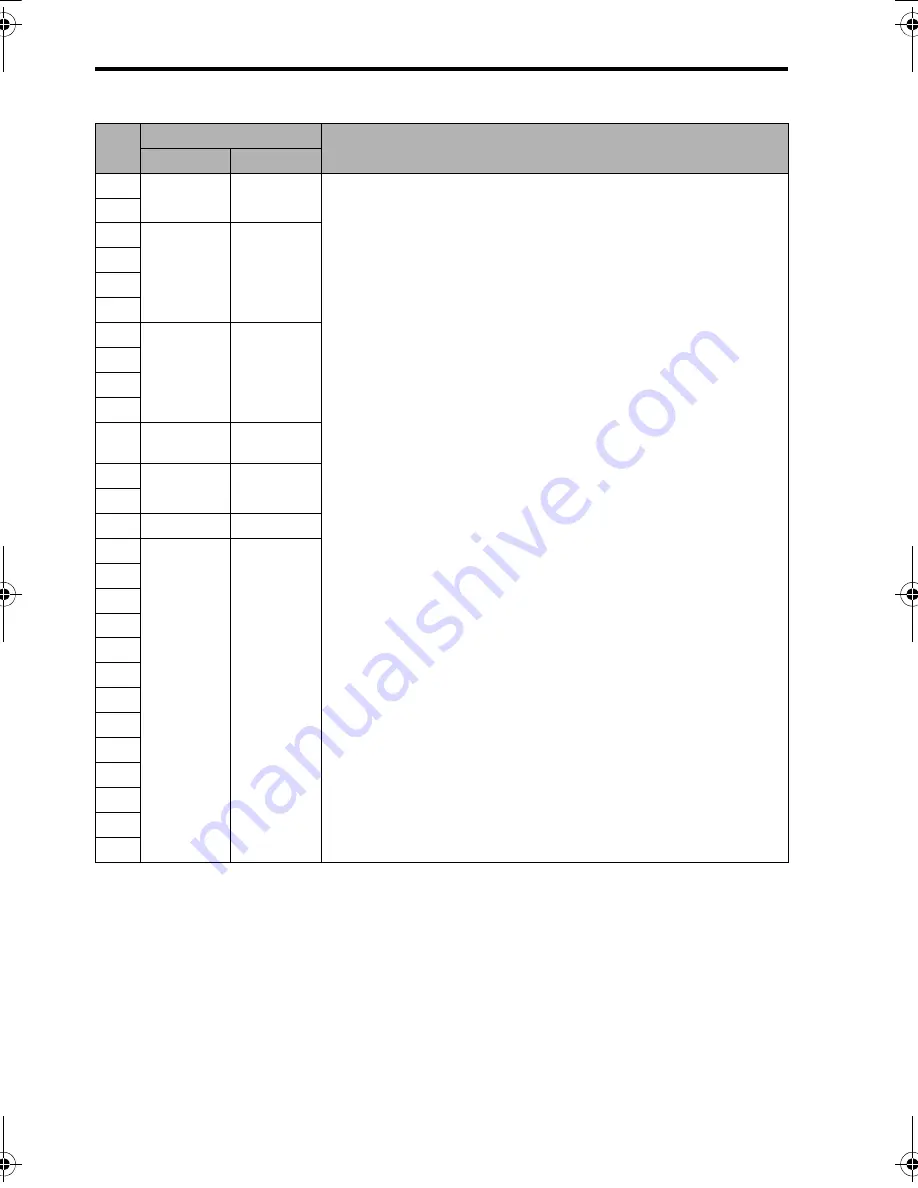
3
OPTION
STATUS
• Perform a homing using the following sequence.
1.
Accelerates to the target speed (TSPD) in the direction specified in
the parameter (Pn816) and continues to move at the target speed.
2.
Decelerates to homing approach speed 1 (Pn817) at the DEC = 1.
3.
Latch operation will start at the DEC = 0.
4.
When a latch signal is input, positioning is performed to define the
target position at the homing approach speed 2 (Pn818). The target
position is calculated by adding the homing final travel distance
(Pn819). After the completion of positioning, the coordinate system is
set so that the position reached is 0.
• Can be used during phases 2 and 3.
• A command warning will occur and the command will be ignored in the
following cases.
-If the SERVOPACK is Servo OFF: Command warning 1 (A.95A)
-If the target speed (TSPD) exceeds the maximum speed: Data setting
warning 2 (A.94B)
• OPTION field cannot be used. Set all bits to 0.
• The target speed (TSPD) is an unsigned 4 bytes. It is sent in the range
from 0 to the maximum speed [reference unit/s].
• Before DEC is input, the target speed during motion can be changed.
• Use DEN (output complete) and ZPOINT (home position) to confirm the
completion of position reference output.
4
5
−
MONITOR1
6
7
8
9
TSPD
MONITOR2
10
11
12
13
SEL_MON
1/2
SEL_MON
1/2
14
−
IO_MON
15
16
WDT
RWDT
17
For sub-
commands.
For sub-
commands.
18
19
20
21
22
23
24
25
26
27
28
29
Byte
ZRET
Description
Command
Response
TOEP_C710806_03A_1_0.book Seite 86 Montag, 2. Juli 2007 3:55 15







































































