





























7 Additional settings
Speed setpoints
l
After the servo drive has been enabled, speed setpoints or positioning start
commands will not become effective until the run delay has elapsed.
l
In
Torque control
mode, the torque setpoints become active immediately, i.e. the
delays are inactive.
Stop delay t
A
: When the servo drive is disabled, the speed setpoint will be set to zero.
When the actual speed is approximately zero, the holding brake will be activated. This is
when the stop delay becomes effective. During this delay time, the drive will be held in its
current position until the holding brake has developed its full holding torque. When the
delay time is over, the servo drive will be disabled. In both cases, the mechanical wear of
the holding brake is reduced.
Damage to the brake or system
In certain applications (e.g. during synchronisation processes), the brake and/or the
system may be damaged when the automatic brake is activated. Always check the
conditions of use before you activate the automatic brake.
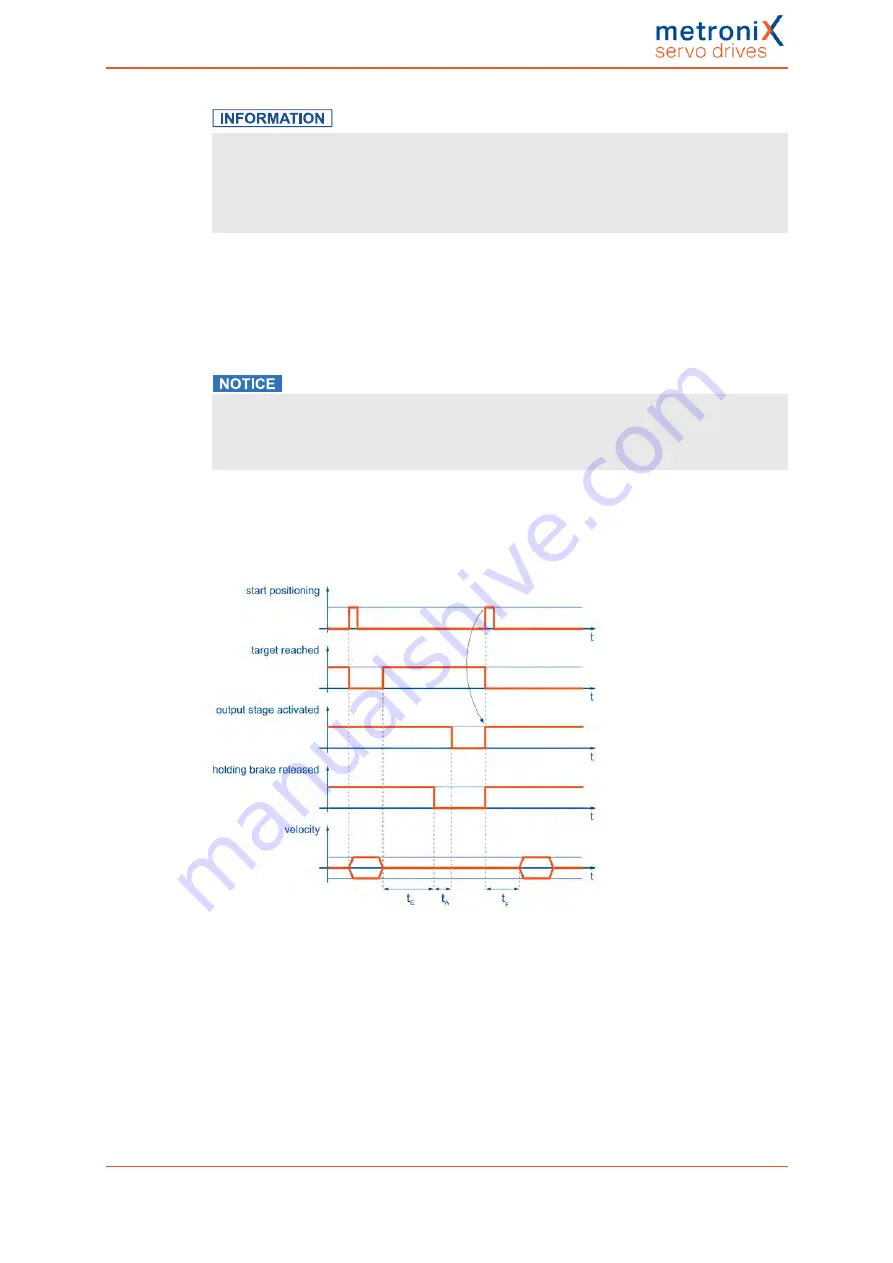
The servo drive has an
Automatic brake
function. If the drive has not moved during a
parameterisable time t
E
(
Activation after…
), the servo drive will automatically activate the
brake and deactivate the output stage.
The automatic brake helps you to save energy.
Figure 111: Brake control parameters: automatic brake
The advantage of this function is that it reduced the stress on the motor and servo drive.
The drive is switched off during a break, so to speak. A potential disadvantage is the
increased level of brake wear. Even if the automatic brake function has deactivated the
output stage, the servo drive is still in the "servo drive enabled" state. This is also
indicated by the CANopen status word, for example. When a new positioning process is
started, the output stage will be activated automatically without the need for an activity of
the control system.
Product manual BL 4000-C
Page 183 of 298







































































