





























Goodrive300-19 series open loop vector inverter special for hosit Basic operation instruction
-185-
Function
code
Name
Function
selection
Function instruction
selection
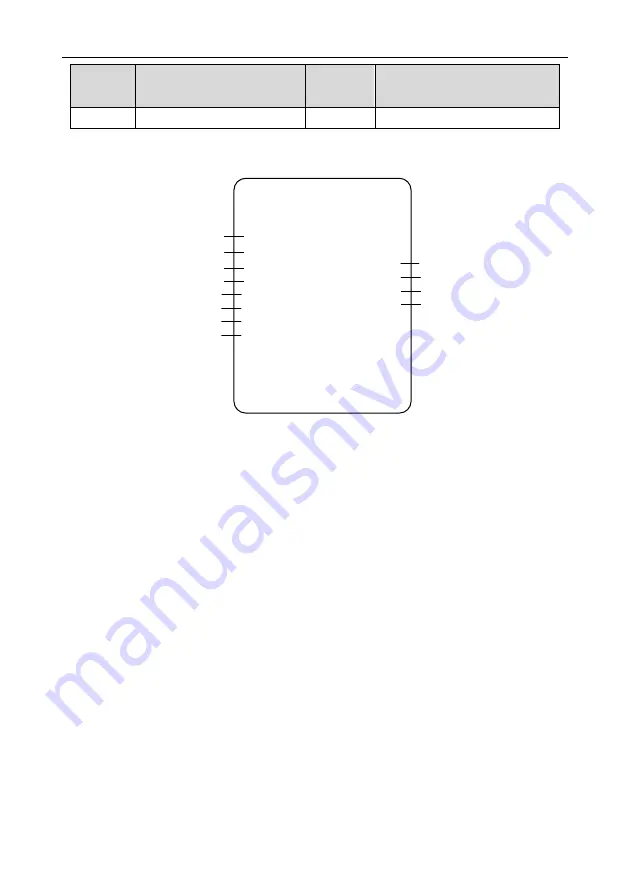
7.16.4 Hierarchical joystick mode
The wiring diagram of hierarchical joystick mode is as follows:
GD300-19 inverter
FWD running
S1
A frequency reference Hierarchical multi-step speed reference
REV running
S2
Fault reset
S3
RO1
Brake output
RO2
Fault output
AO1 Running frequency
AO2
Current output
Hierarchical reference
terminal 1
S4
S5
S6
Zero position signal
S7
Hierarchical reference
terminal 2
Hierarchical reference
terminal 3
The mode is used in the case where the reference contact of the hierarchical joystick is connected to
the digital input I/O of the inverter. Set P19.00 to
“3: Hierarchical joystick mode”.
The forward and reverse direction signals of the hoist are given by S1 and S2, and the speed is given
by the hierarchical reference of multi-step speed terminals. The mode supports up to 6 different
speed levels: 1 contact at the 1
st
speed level +5 contacts at other speed levels given by direction
command. The hierarchical contact can be connected to the selected digital input S terminal and the
corresponding speed reference is given by mulit-step speed hierarchical reference 1~5
(P19.06~P19.11). The system is 4 gear speed by default and it can be regulated as required.
The hierarchical contacts of speed reference should close from lower to upper. Only when all lower
hierarchical contacts close can the upper hierarchical contacts close. If the lower hierarchical contacts
open while the upper hierarchical contacts close, the inverter will alarm hierarchical joystick fault and
stop.
The mode can select joystick zero postion detection. After stop, the inverter will not be allowed to
restart until the joystick returns to zero position (neutral position) and the time exceeds the defined
time in P19.28. When P19.27=1, detection enabling at joystick zero position is valid.
The parameters of hierarchical joystick mode are as follows:







































































