





























Chapter 3 Operation
3.3 Setting of Position Data
56
3.3 Setting of Position Data
For ERC3 actuator, two types of operation types (CON Mode / MEC Mode) can be selected
when purchased. Since the position data differs for each type, have the settings established
considering the purchased ERC3 type.
3.3.1 CON Mode Type Setting
Positioner and Remote I/O Mode makes an operation based on the position data (position,
velocity, etc.) set in advance in the position table. Set the target position first.
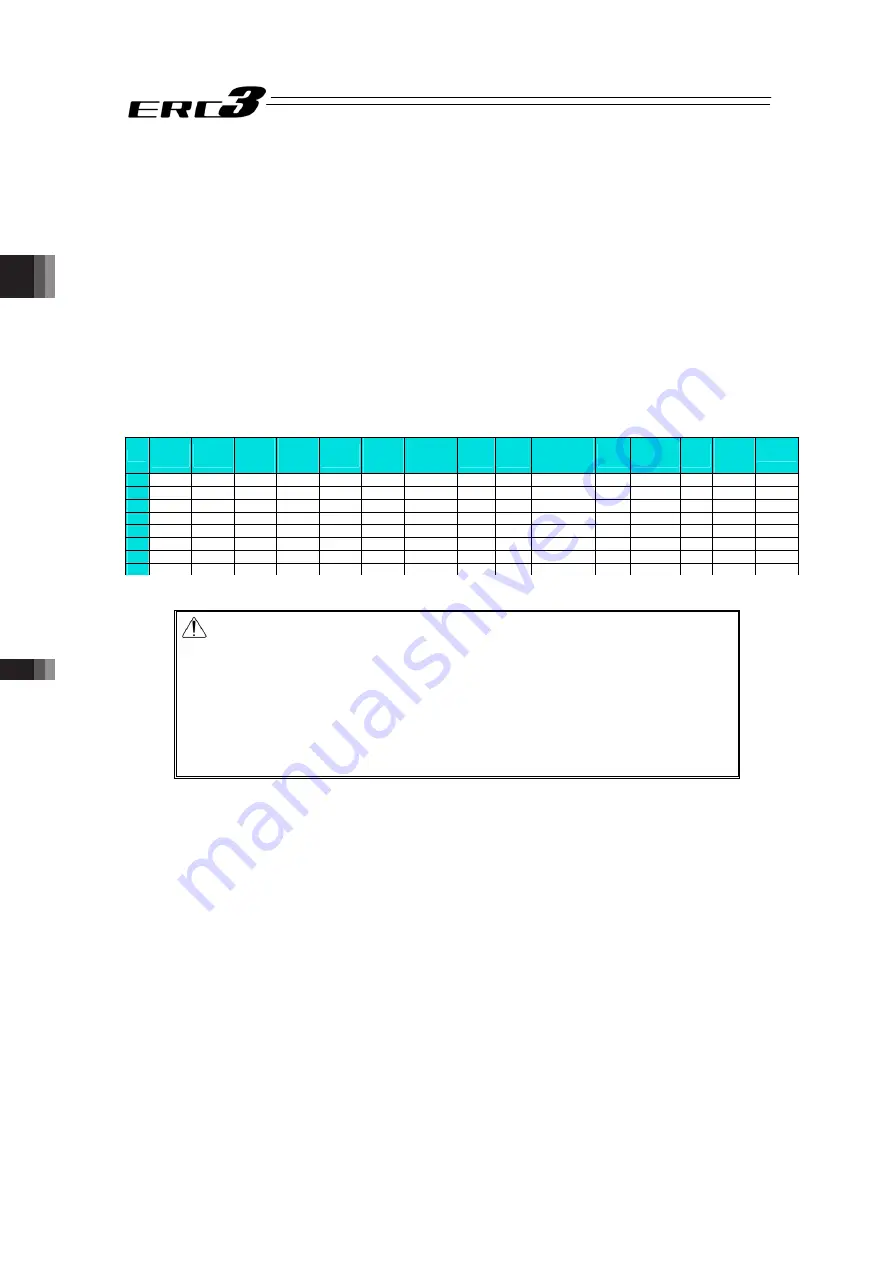
The values in the position table can be set as shown below. In the case that only positioning is
necessary, all you have to do is to input the position data, and nothing else is required as long
as the indication of acceleration and deceleration is needed. For the velocity and
acceleration/deceleration, the data set to the parameters is automatically reflected to the
setting. Therefore, the work can be simple if you put the speed and acceleration/deceleration
data to the parameter setting.
1)
2)
3)
4)
5)
6)
7)
8)
9)
10)
11)
12)
13)
14)
15)
No. Position
[mm]
Velocity
[mm/s]
Accele-
ration
[G]
Decele-
ration
[G]
Pressing
[%]
Thresh-
old
[%]
Positioning
width
[mm]
Zone+
[mm]
Zone-
[mm]
Acceleration/
Deceleration
mode
Incre-
mental
Transported
load
Stop
mode
Vibration
suppress
No.
Comment
0
0.00
100.00
0.30
0.30
0.00
0.00
0.10
0.00
0.00
0
0
0
0
0
1
100.00
100.00
0.30
0.30
0.00
0.00
0.10
0.00
0.00
0
0
0
0
0
2
150.00
200.00
0.30
0.30
50.00
0.00
30.00
0.00
0.00
0
0
0
0
0
3
300.00
400.00
1.00
1.00
0.00
0.00
0.10
0.00
0.00
0
0
0
0
1
4
200.00
200.00
0.30
0.30
0.00
0.00
0.10 250.00 230.00
0
0
0
0
2
5
500.00
50.00
0.10
0.10
0.00
0.00
0.10
0.00
0.00
0
0
0
0
0
6
7
1) Position numberꞏꞏꞏꞏꞏꞏꞏꞏꞏ It is the number to be indicated by PLC at startup.
Caution : Do not use Position No.0 if there is margin to the positions.
Even if the actuator is not at the position of Position No.0 in the first
servo-ON after the power is turned ON, the output of complete
position number is 0, thus it is the same condition as positioning at
the point of Position No.0. And, the output of the complete position
number while the actuator is moving is also 0 In case a use of
Position No.0 is desired, take a note of the history of the commands
in the sequence program and check Position No.0 matching with the
history.
2) Position [mm] ꞏꞏꞏꞏꞏꞏꞏꞏꞏꞏꞏꞏ It is the coordinate value for positioning. Input the position from the
home position.
Input the pitch width for the pitch feed (relative movement =
incremental feed).
A movement toward the home position is made if – is added, and
toward the opposite side if not added.
3) Velocity [mm/s] ꞏꞏꞏꞏꞏꞏꞏꞏꞏ Set the velocity in the operation.
Do not attempt to input a value more than the maximum velocity or
minimum velocity
(Note 1)
.
Note 1 Refer to the values stated in the Chapter 7 Appendix or the
following for the calculation
Minimum speed [mm/s] = Lead length [mm] / No. of Encoder
Pluses / 0.001 [s]
ME0302-4A
Summary of Contents for ERC3
Page 1: ...IAI Corporation ERC3 Gateway Unit Instruction Manual Forth Edition ...
Page 2: ......
Page 4: ...ME0302 4A ...
Page 8: ...ME0302 4A ...
Page 35: ...Chapter 1 Specifications Check 1 6 Option 27 1 6 Option はケーブル長 ME0302 4A ...
Page 54: ...Chapter 2 Wiring 2 3 Wiring Method 46 ME0302 4A ...
Page 158: ...Chapter 3 Operation 3 8 Field Network LED Indication 150 ME0302 4A ...
Page 160: ...Chapter 4 I O Parameter 152 ME0302 4A ...
Page 176: ...Chapter 5 Troubleshooting 5 4 Alarm List 168 ME0302 4A ...
Page 186: ......
Page 187: ......







































































