


























89
Pn No.
Size
Name
Setting range
Setting
Unit
Factory setting Available
time
Catego
ry
Rema
rks
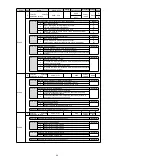
Pn100
2 Velocity loop gain
10
~
20000
0.1 Hz
400
Effective
immediately
Adjust
ment
Pn101
2 Velocity loop integration
time parameter
15
~
51200
0.01 ms
2000
Effective
immediately
Adjust
ment
Pn102
2 Position loop gain
10
~
20000
0.1/s
400
Effective
immediately
Adjust
ment
Pn103
2 Moment of inertia ratio
0
~
20000
1%
100
Effective
immediately
Adjust
ment
Pn104
2 Gain of second speed loop
10
~
20000
0.1 Hz
400
Effective
immediately
Adjust
ment
Pn105
2 The second speed loop
integration time parameter
15
~
51200
0.01 ms
2000
Effective
immediately
Adjust
ment
Pn106
2 2nd position loop gain
10
~
20000
0.1/s
400
Effective
immediately
Adjust
ment
Pn109
2 Feedforward
0
~
100
1%
0
Effective
immediately
Adjust
ment
Pn10A
2 Feedforward filtering time
parameter
0
~
6400
0.01 ms
0
Effective
immediately
Adjust
ment
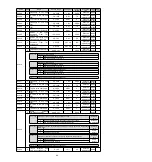
Pn10B
2 Gain
class
application
switch
0000
~
5334
-
0000
-
Setup
-
n.
X
Mode switch selection
Available
time
Remarks
0
On condition of internal torque command (value setting:
Pn10C).
Effective
immediately
1
On condition of speed command (value setting: Pn10D).
On condition of speed command (value setting: Pn181).
2
Under the condition of acceleration (value setting:
Pn10E).
Under the condition of acceleration (value setting:
Pn182).
3
On condition of position deviation (value setting: Pn10F).
4
No mode switch function
n.
X
Control Method of Speed Ring
Available
time
Remarks
0
PI Control
Power
restart
1
I-P control
2
~
3
Appointment Parameters (Do Not Set)
n.
X
Appointment parameters (do not change it)
n.X
Appointment parameters (do not change it)
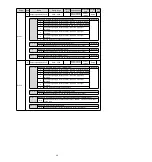
Pn10C
2 Mode switch
(Torque command)
0
~
800
1%
200
Effective
immediately
Adjust
ment
Pn10D
2 Mode switch
(Speed command)
0
~
10000
1 min
-1
0
Effective
immediately
Adjust
ment
Pn10E
2 Mode switch
(Acceleration)
0
~
30000
1min
-1
/S
0
Effective
immediately
Adjust
ment
Pn10F
2 Mode switch
(Location deviation)
0
~
10000
1 Command
unit
0
Effective
immediately
Adjust
ment
Pn11F
2 Position integration time
parameter
0
~
50000
0.1 ms
0
Effective
immediately
Adjust
ment
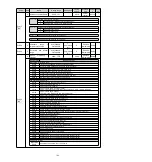
Pn121
2 Friction compensation gain
10
~
1000
1%
100
Effective
immediately
Adjust
ment
Pn122
2 Second friction
compensation gain
10
~
1000
1%
100
Effective
immediately
Adjust
ment
Pn123
2 Friction compensation
coefficient
0
~
100
1%
0
Effective
immediately
Adjust
ment
Pn124
2 Friction compensation
frequency correction
-10000
~
10000
0.1 Hz
0
Effective
immediately
Adjust
ment
Pn125
2 Friction compensation gain
correction
1
~
1000
1%
100
Effective
immediately
Adjust
ment
Pn131
2 Gain switching time1
0
~
65535
1 ms
0
Effective
immediately
Adjust
ment
Pn132
2 Gain switching time2
0
~
65535
1 ms
0
Effective
immediately
Adjust
ment
Pn135
2 Gain switching latency 1
0
~
65535
1 ms
0
Effective
immediately
Adjust
ment
Pn136
2 Gain switching latency 2
0
~
65535
1 ms
0
Effective
immediately
Adjust
ment







































































