





























33
Important
Even if the brake command output speed value (Pn507) is set to a value greater than the maximum speed of
the servo motor used, it will still be limited to the maximum speed of the servo motor.
5.10 Servo OFF and Motor Stop Method in Alarm
Servo OFF and motor stop method when alarm occurs are as follows.
There are four ways to stop the motor.
Stop method of motor
Meaning
The dynamic brake (DB)
stops
By short-circuiting the electrical circuit of the servo motor, the servo motor can be
stopped urgently.
Free running stop
It stops naturally due to friction when the motor rotates.
Zero speed stop
Set the speed command to "0" to make the servo motor stop urgently.
Slow down and stop
According to the emergency stop torque deceleration stop.
There are three states after the motor stops.
Turn state after motor stops
Meaning
Turn state after motor stops
The state in which the servo motor stops after short-circuiting the electrical circuit.
Free running state
The state in which the servo drive does not control the servo motor (the machine will act
when applying force from the load side)
Zero position fixed state
A position ring is formed, and the position command is a stop state of "0" (the current
stop position is maintained)
Important
Dynamic brake (DB) is a function of emergency stop. If starting and stopping are performed by power
supply ON/OFF or servo ON in the state where the command is input, the DB loop will operate frequently,
resulting in aging of internal components of servo drive. Please start and stop the servo motor by speed
input command or position command.
During operation, when the servo is not OFF and the main circuit power supply is OFF or the control power
supply is OFF, DB stop is not adopted, but when free operation stop must be adopted, please use the
servo drive applicable to the dynamic brake option.
Regarding the stopping method during alarm, in order to try to shorten the inertial moving distance when
the alarm occurs, the factory settings are all zero-speed stop for alarms that allow the selection of
zero-speed stop. However, depending on the application, sometimes DB stop is more suitable than zero
speed stop.
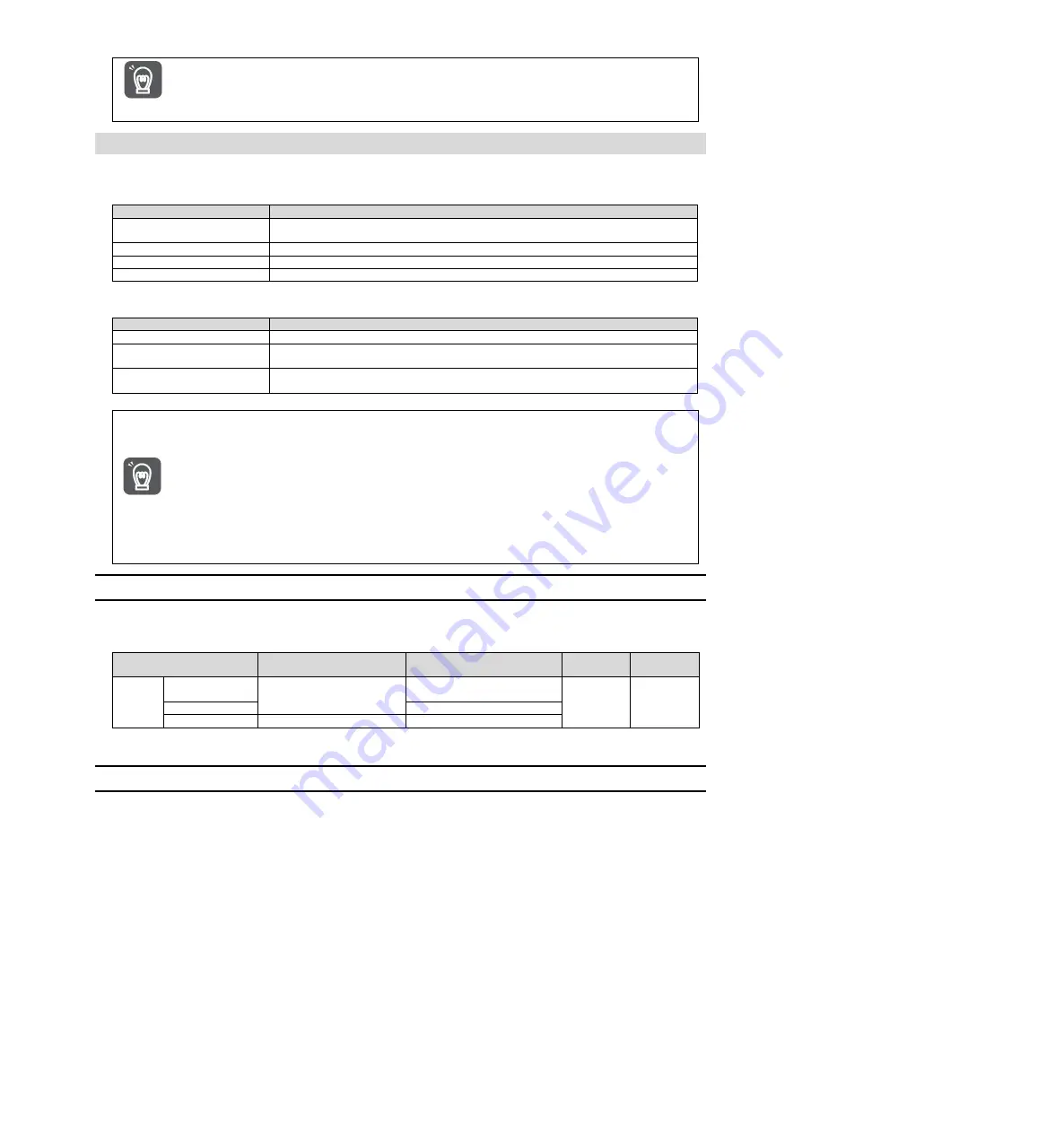
5.10.1 Motor Stop Method when Servo OFF
The motor stop method for servo OFF is selected through Pn 001 = n.
X (servo OFF and stop method for
Gr.1 alarm).
Parameter
Stop method Servo motor
State after the servo motor
stops
Effective
time
Category
Pn001
n.
0
[Factory setting]
Dynamic brake
Dynamic brake
Power
restart
Setup
n.
1
Free-running operation
n.
2
Free-running operation
Free-running operation
(Note) When Pn 001 = n.
0 is set (the motor is stopped by the dynamic brake), when the servo motor stops or rotates at an
extremely low speed, no braking force will be generated as in the free running state.
5.10.2 Motor stopping method when alarm occurs
Alarms are divided into Gr.1 alarm and Gr.2 alarm. Parameters for setting the motor stop method when an
alarm occurs vary depending on the alarm type.
Motor Stop Method in Case of Gr.1 Alarm
When Gr.1 alarm occurs, the servo motor stops according to Pn 001 = n.
X. Factory set to dynamic brake
stop.
Motor Stop Method in Case of Gr.2 Alarm
When Gr.2 alarm occurs, the servo motor stops according to the settings of the following 3 parameter
combinations. Factory set for zero speed stop.
• Pn001=n.
X
(
Servo OFF and stop method when Gr.1 alarm occurs
)
• Pn00A= n.
X (stop method in case of Gr.2 alarm)
• Pn00B= n.
X
(stop method in case of Gr.2 alarm)
However, in torque control, Gr.1 stopping method is generally used. When set to Pn00B = n.
1
(db stop
or free running stop), the same stop method as Gr.1 can be adopted. When using multiple servo motors in
coordination, this stopping method can be used to prevent the machine from being damaged due to different
stopping methods during alarm.







































































