
























92
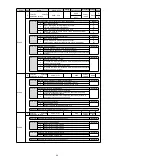
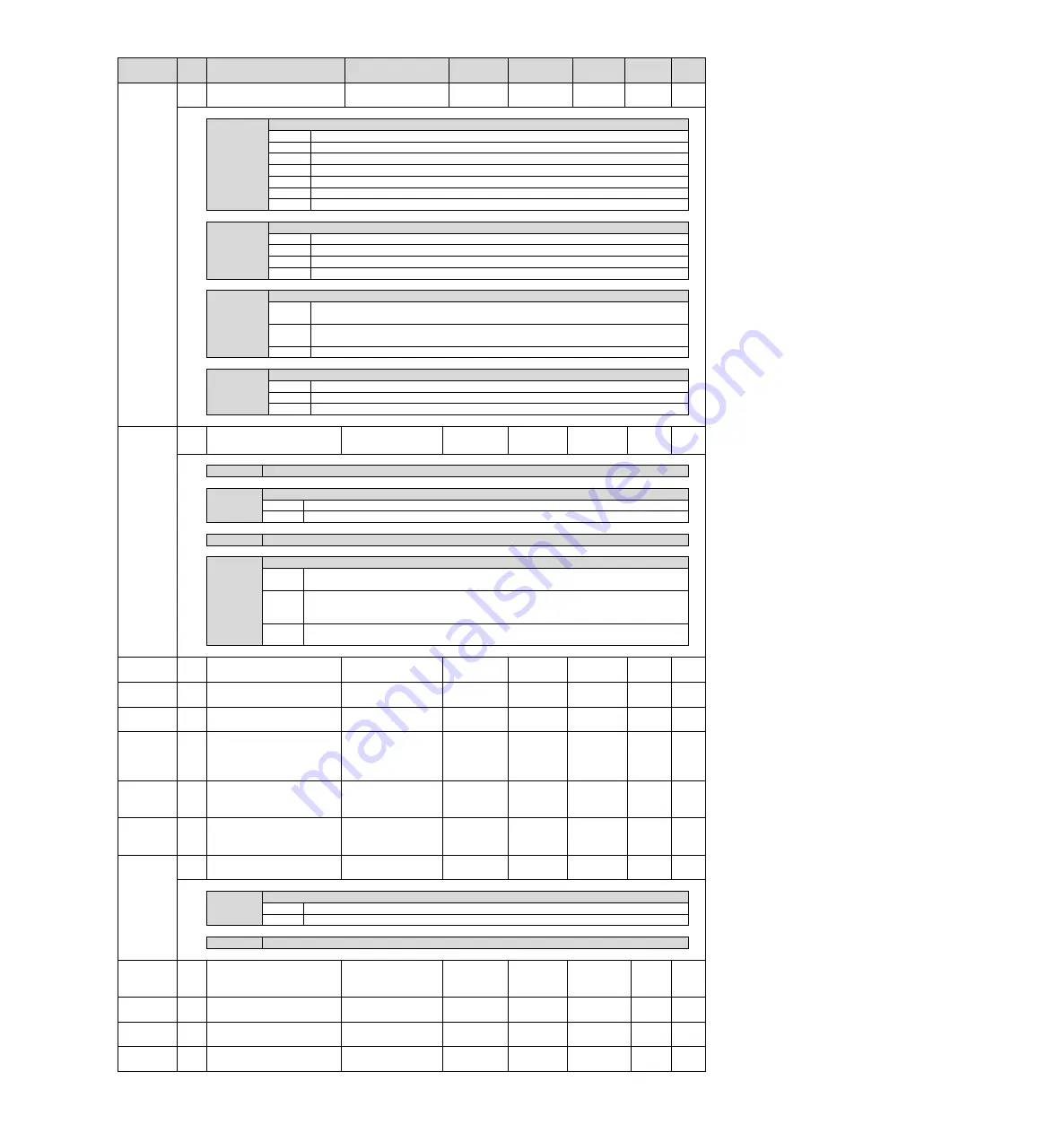
Pn No.
Size
Name
Setting range
Setting Unit
Factory
setting
Available
time
Categor
y
Model
Pn200
2 Position control command
form selector switch
0000
~
2236
-
0000
Power
restart
Setup
P
n.
X
Command pulse pattern
0
Sign+Pulse, Positive Logic
1
CW+CCW Pulse Sequence, Positive Logic
2
90° phase difference two-phase pulse (phase A+phase B) 1 times, positive logic
3
90° phase difference two-phase pulse (phase A+phase B) 2 times, positive logic
4
90° phase difference two-phase pulse (phase A+phase B) 4 times, positive logic
5
Sign+Pulse Sequence, Negative Logic
6
CW+CCW Pulse Sequence, Negative Logic
n.
X
Clear signal pattern
0
Clear position deviation when signal H level.
1
Clear the position deviation when the signal is enhanced.
2
Clear position deviation when signal l level.
3
Clear the position deviation when the signal decays.
n.
X
Clear action
0
Clear the position deviation when the base is blocked (servo OFF and alarm
occurs).
1
The position deviation is not cleared (only cleared by the position deviation clear
input (CLR) signal).
2
Clear position deviation when alarm occurs.
n.X
No adjustment of load value
0
Command for using a linear drive signal is input to the filter 1.
(~
1Mpps
)
1
Command input filter for open collector signal is used.
(~
200kpps
)
2
An instruction for using a linear drive signal is input to the filter 2.
(
1
~
4Mpps
)
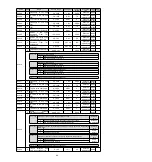
Pn207
2 Position control function
switch
0000
~
2210
-
0010
Power
restart
Setup
-
n.
X
Appointment parameters (do not change it)
n.
X
Position control selection
0
No V-REF allocation
1
V-REF is used as the speed feed forward input.
n.
X
Appointment parameters (do not change it)
n.X
Output Time for Positioning Complete Output
(
/COIN
)
Signal
0
When the absolute value of the position deviation is less than the positioning
completion amplitude (Pn522), it is output.
1
When the absolute value of the position deviation is less than the positioning
completion amplitude (Pn522) and the filtered command of the position command is
0, it is output.
2
The absolute value of the position deviation is smaller than the positioning completion
amplitude (Pn522) and is output when the position command input is 0.
Pn20E
4 Electronic
gear
ratio
(molecule)
1
~
1073741824
1
1
Power
restart
Setup
Pn210
4 Electronic
gear
ratio
(denominator)
1
~
1073741824
1
1
Power
restart
Setup
Pn212
4 Encoder frequency division
pulse count
16
~
1073741824 1 pitch /Rev
2500
Power
restart
Setup
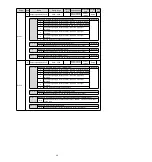
Pn216
2
Position
command
acceleration
and
deceleration
time
parameters
0
~
65535
0.1ms
0
Effective
after the
motor stops
Setup
Pn217
2 Moving average time of
position command
0
~
10000
0.1ms
0
Effective
after the
motor stops
Setup
Pn218
2 Command
pulse
input
multiplying power
1
~
100
1 times
1
Effective
immediatel
y
Setup
Pn230
2 Position control extension
function switch
0000
~
0001
-
0000
Power
restart
Setup
-
n.
X
Backlash compensation direction
0
Backlash-free compensation is carried out by commands in the positive direction.
1
Backlash-free compensation is carried out by command in the opposite direction.
n.X X X
Appointment parameters (do not change it)
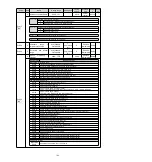
Pn231
4 Backlash compensation
-500000
~
500000
0.1
Command
unit
0
Effective
immediately Setup
Pn233
2 Backlash
compensation
time parameter
0
~
65535
0.01 ms
0
Effective
immediately Setup
Pn300
2 Speed command input gain
150
~
3000
0.01 V/
Rated speed
600
Effective
immediately Setup
Pn301
2 Internal set speed 1
0
~
10000
1 min
-1
100
Effective
immediately Setup







































































