





























50
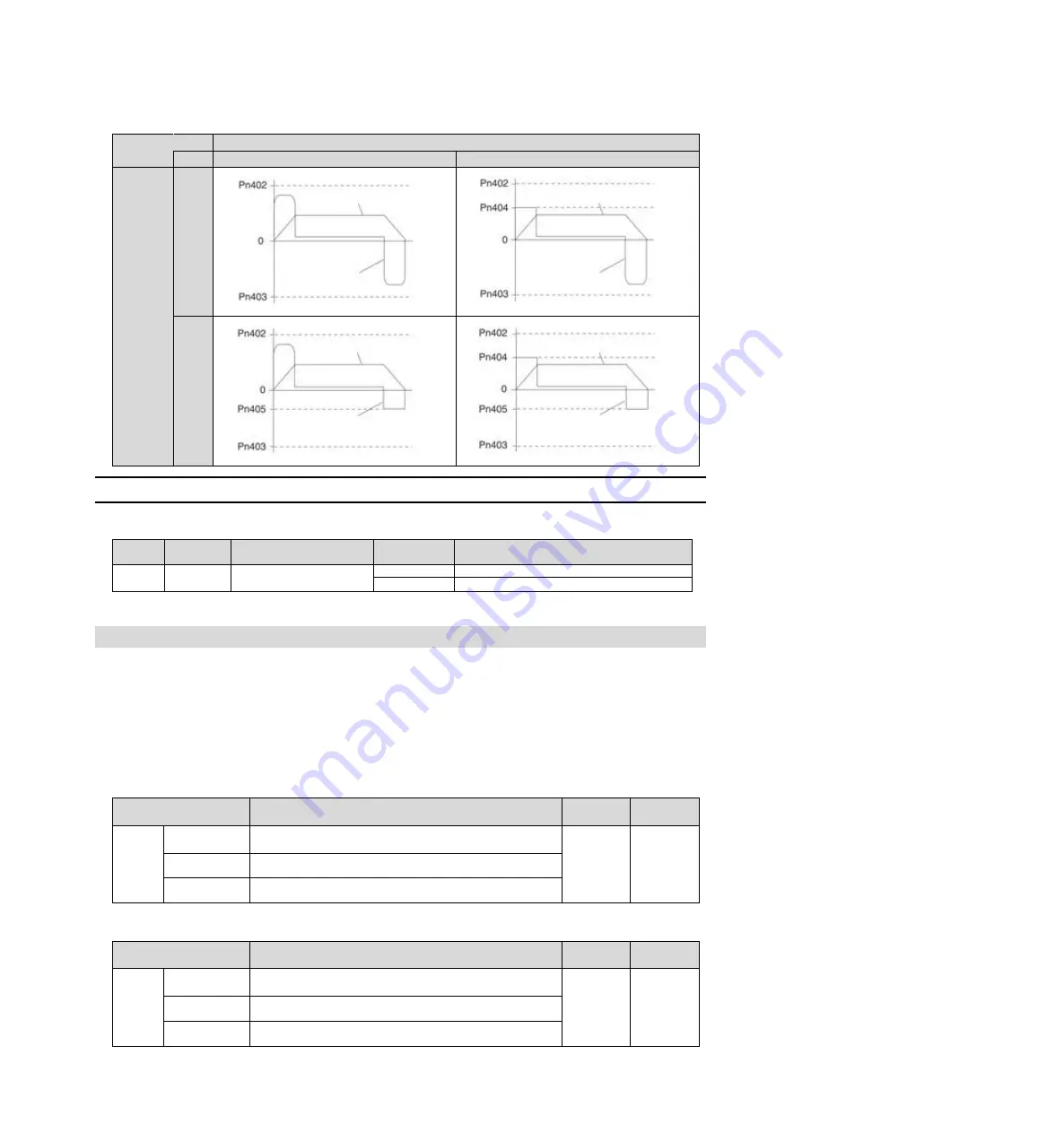
Output torque variation at external torque limit
Indicates the output torque when the internal torque limit is set to 800%.
The rotation direction of the motor is set to Pn000 = n.
0 (with CCW direction as forward rotation) as an
example.
Signal
/P-CL
State
OFF
ON
/N-CL
OFF
ON
6.7.3 Torque limit detection output (/CLT) signal
The /CLT signal indicating the motor output torque limit state is as follows.
Type
Signal
name
Connector pin number
Signal status
Meaning
Input
/CLT
Distribution required
ON (closed)
The motor output torque is limited.
OFF (OFF)
The motor output torque is not limited
(Note) /CLT signal needs to be distributed. It can be set to Pn50F = n.
X (distribution of torque limit output (/CLT) signal) and
distributed to terminals.
6.8 Absolute position
The absolute value encoder will still remember the current position of the stop position after the power supply
is turned OFF.
In a system using an absolute value encoder, the current position can be grasped by an upper controller.
Therefore, when the system is powered on, there is no need to perform the origin reset operation.
There are three encoders for servo motors. Each encoder can be specified by setting Pn002 = n.
X
.
Parameter Setting When Using Incremental Encoder
Parameter
Meaning
Effective
time
Category
Pn002
n.
0
[Factory setting]
Used as incremental encoder.
No battery is required.
Power
restart
Setup
n.
1
Used as incremental encoder.
No battery is required
n.
2
Used as 1 coil absolute value encoder.
No battery is required.
Parameter setting when using 1-turn absolute value encoder
Parameter
Meaning
Effective
time
Category
Pn002
n.
0
[Factory setting]
Used as 1 coil absolute value encoder.
No battery is required.
Power
restart
Setup
n.
1
Used as incremental encoder.
No battery is required
n.
2
Used as 1 coil absolute value encoder.
No battery is required.
Speed
Speed
Speed
Torque
Torque
Torque
Torque







































































