

















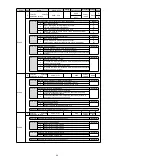











82
Fault contents
Reason
Confirmation method
The treatment measures
Excessive speed
overshoot at start
and stop
Improper matching of servo
gain
Confirm whether gain adjustment
has been implemented.
Perform automatic adjustment (no upper
command).
The speed loop gain (Pn100) is
set too high
Confirm the setting value of speed
loop
gain
(PN100).
Factory
setting: Kv = 40.0 Hz
Set the correct speed loop gain (Pn100)
setting.
The set value of the position
loop gain (Pn102) is too high
Confirm the set value of position
loop gain (Pn102). Factory setting:
Kp = 40.0/s
Set the correct setting value of position
loop gain (Pn102).
The speed loop integration
time parameter (Pn101) is not
set correctly
Confirm the set value of integral
time parameter (Pn101) of speed
loop. Factory setting: Ti = 20.0 ms
Set the correct speed loop integration time
parameter (Pn101) setting value.
The setting value of rotational
inertia ratio or mass ratio
(Pn103) is incorrect
Confirm the set value of the
moment of inertia ratio or mass
ratio (Pn103).
Set the correct moment of inertia or mass
ratio (Pn103).
Torque command saturation
Confirm
torque
command
waveform.
Use the mode switch function.
Thrust limit (Pn483, Pn484)
remains factory set
Thrust Limit: Factory Setting
Pn483 = 30%
,
Pn484 = 30%
Set the correct thrust limit (Pn483, Pn484)
value.
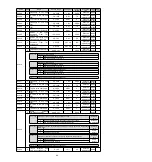
Error in absolute
value
encoder
position deviation
(deviation between
the position when
the power supply is
OFF
and
the
position when the
power supply is
ON again recorded
by
the
upper
device)
Mutual interference occurred
due to incorrect specifications
of cables used for encoders.
Confirm whether the cable for
encoder meets the specification.
The cable specification: double
stranded shielded wire or double
stranded unified shielded wire with
core wire of more than 0.12mm
2
and tinned soft copper stranded
wire.
Use cables that meet specifications.
Because the encoder cable is
too long, mutual interference
occurs
Confirm the cable length for
encoder.
Set the length of encoder cable within 50m.
Due to encoder cable damage,
mutual interference occurs
Confirm whether the encoder
cable is clamped and the cladding
is damaged.
Replace encoder cable and change cable
laying environment.
Excessive mutual interference
on encoder cable
Verify that the encoder cable is
tied together or too close to the
high current wire.
Change the laying environment of encoder
cables so as not to be affected by surge
voltage of high-current wires.
The potential of FG changes
due to the influence of servo
motor-side equipment (welding
machine, etc.)
Confirm the grounding status of
servo motor side equipment
(forget
grounding,
incomplete
grounding).
Properly ground the servo motor side
equipment to prevent shunt to encoder side
FG.
Error in calculation of servo
drive pulse due to mutual
interference
Confirm whether there is mutual
interference between encoder or
serial conversion unit and signal
line.
Anti-interference measures shall be taken
for the connection of encoder or serial
conversion unit.
Encoder
is
affected
by
excessive vibration impact.
Confirm
whether
mechanical
vibration occurs. Confirm the
installation state of servo motor
(precision of installation surface,
fixed state, eccentric core).
Reduce mechanical vibration. And the
installation state of the servo motor or the
encoder is improved.
Encoder failure
-
Replace the servo motor or encoder.
Servo drive failure
-
Replace the servo drive.
Error
in
reading
rotation
number data or absolute value
encoder position data of upper
device
Confirm the error detection part of
the upper device.
Make the error detection part of the upper
device work normally.
The upper device is used to
confirm whether the parity data
has been checked. Prepare the
data or absolute value of the
number of Coil
Parity check of rotation number of coil data
or absolute value encoder position data is
performed.
Confirm whether there is mutual
interference on the cable between
the servo drive and the upper
device.
Anti-interference measures shall be taken
to check the parity of rotation number of
coil data or absolute value encoder position
data again.
Overtravel
(OT)
occurred.
The
drive
input
(P-OT/N-OT)signal of forward /
reverse side is input
Confirm the voltage of the external
power supply (+24 V) for the input
signal.
Set the voltage of the external power
supply (+24V) for the input signal to the
correct value.
Confirm the operating state of the
over-travel limit switch.
Make the over-travel limit switch operate
normally.
Confirm
the
wiring
of
the
overtravel limit switch.
Correct wiring of over-travel limit switch.
Confirm
the
set
value
of
over-travel input signal distribution
(Pn50A or Pn50B).
Set parameters correctly.
The misoperation of the drive
input (P-OT/N-OT) signal on
the forward/reverse side is
prohibited
Confirm whether the voltage of the
external power supply (+24 V) for
the input signal fluctuates.
Eliminate voltage fluctuation of external
power supply (+24 V) for input signal.
Confirm whether the action state
of the overtravel limit switch is
unstable.
So that the action state of the overtravel
limit switch is stable.
Confirm
the
wiring
of
the
overtravel limit switch (cable
damage, screw fastening status,
etc.).
Correct wiring of over-travel limit switch.
Error in the signal of the drive
input
(P-OT/N-OT)
that
prohibits
forward/reverse
rotation for parameters (Pn50A
= n.X
, Pn50B =
n.
X)
Confirm P-OT signal allocation
Pn50A= n.X
.
If other signals are assigned to PN50A =
n.X
, the P-OT signal is reassigned to
this parameter.
Confirm N-OT signal distribution
Pn50B=n.
X.
If
other
signals
are
assigned
to
Pn50B=n.
X, then the N-OT signal is
reassigned to this parameter.
Servo motor stop method
selection error
Confirm the stop method when
servo is OFF (Pn001 = n.
X,
or pn 001 = n.
).
Select a servo motor stop method other
than free running stop.
Confirm the stop method for Select a servo motor stop method other







































































