





























V&T Technologies Co., Ltd.
http://www.ecodrivecn.com
Chapter 6 Parameter Description
116
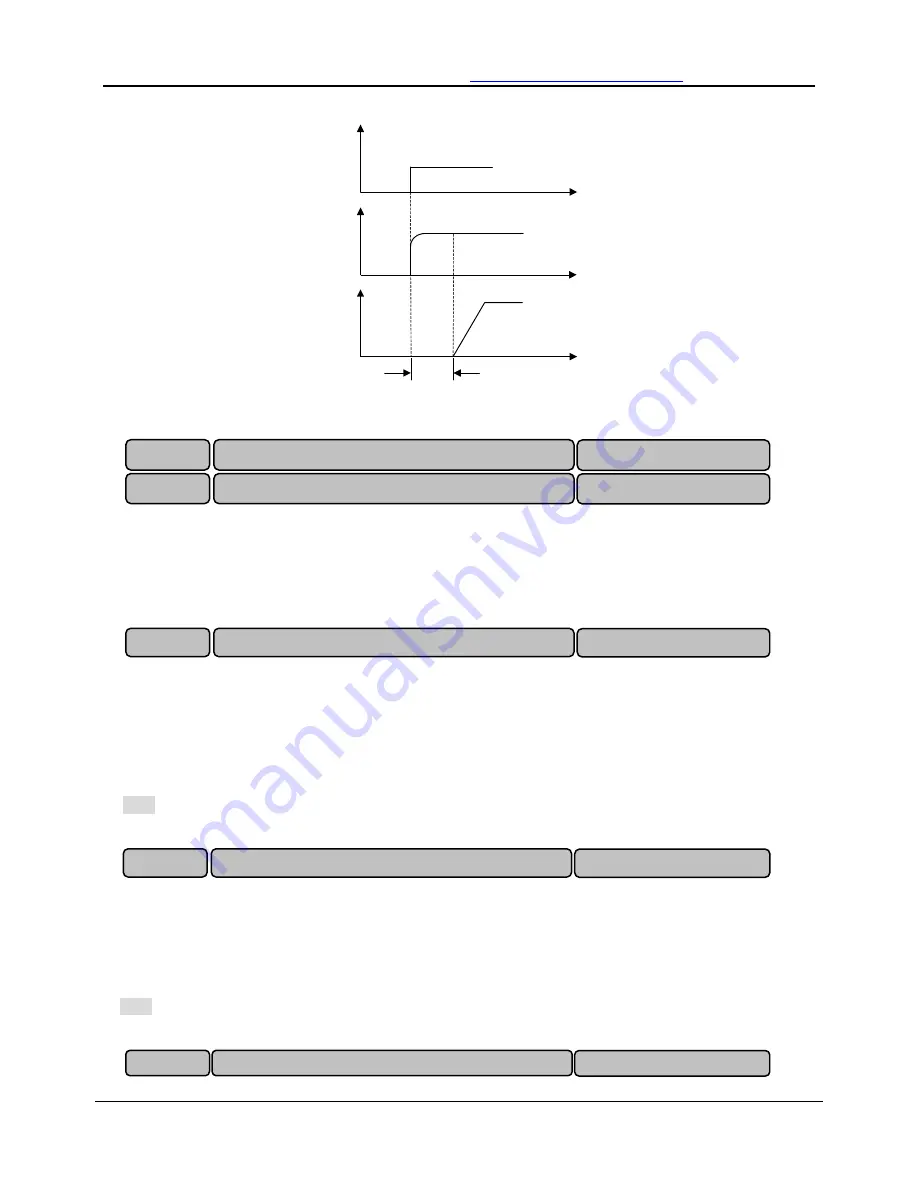
Time
ON
Pd.14
Time
Time
Operation
command
Flux
Speed
Fig. 6-37 Pre-magnetizing
Vector control will control the output current of motor and keep track of current instruction value. Scale
and integral gain of current control (ACR) shall be set here. Usually the factory default shall not be
changed. Generally, increase P gain when coil inductance is high, decrease P gain when coil inductance
is low. Current oscillation will be occurred as a result of setting I gain to extremely high.
When loads increase, motor slip will increase, but the rotating speed will decrease. The speed of motor
can be controlled constantly by slip compensation. Please make adjustments according to below
conditions:
When the motor speed is below the setting target value, increase vector control slip compensation gain.
When the motor speed is above the setting target value, decrease vector control slip compensation gain.
Note: When the temperature of motor increases, interior parameters of motor will change and the slip will
increase. Adjusting the function code can help to compensate the effects from temperature rise of motor.
When loads increase, motor’s slip will increase, and the rotating speed will also increase. The speed of
motor can be controlled constantly by slip compensation. Please make adjustments according to below
conditions:
When the motor speed is below the setting target value, decrease vector control slip compensation gain.
When the motor speed is above the setting target value, increase vector control slip compensation gain.
Note: When the temperature of motor increases, interior parameters of motor will change and the slip will
increase. Adjusting the function code can help to compensate the effects from temperature rise of motor.
Pd.15
Current loop scale coefficient (ACR_P)
0~2000(1000)
Pd.16
Current loop integral coefficient (ACR_I)
0~6000(1000)
Pd.17
Vector control slip compensation gain (electric)
10.0~300.0 %( 100.0%)
Pd.18
Vector control slip compensation gain (power generation)
10.0
~
300.0 %
(
100.0%
)
Pd.19
ASR input filtering time
0.0
~
500.0 ms
(
0.5ms
)







































































