




















V&T Technologies Co., Ltd.
http://www.ecodrivecn.com
Appendix B Control Mode Setting Process
141
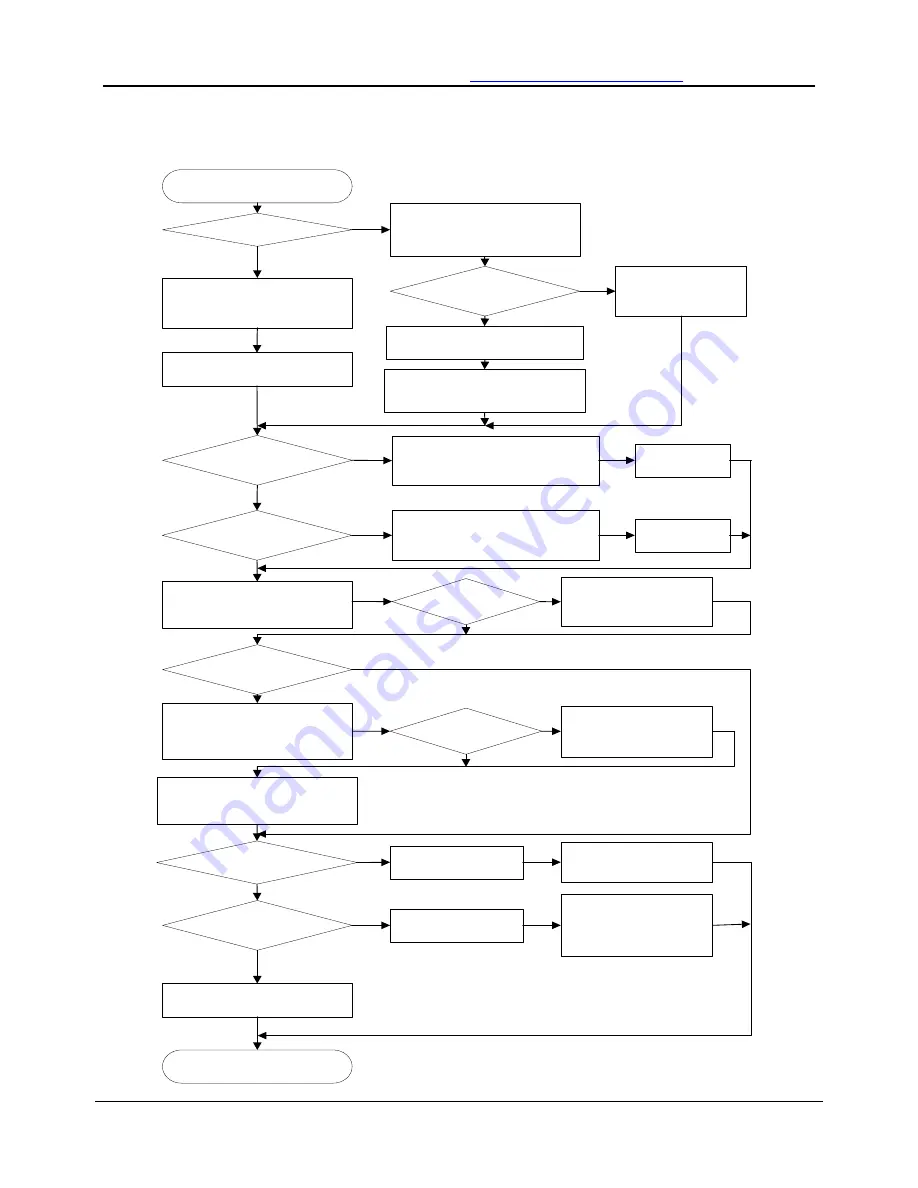
2. Setting Process for Open Loop
START
Parameter identification (For details,
refer to setting process for parameter
auto-tuning under vector control 1 in
appendix B)
Select open loop main reference mode
P0.04 (For details, refer to the function
description of P0.04 in Chapter 6)
Select open loop main and auxiliary
relation calculation P1.01 (For details,
refer to the function description of
P1.01 in Chapter 6)
Select function of X control
terminal(For details, refer to
the function description of
P5.00 to P5.06 in Chapter 6)
Open loop auxiliary reference ?
Select open loop auxiliary reference
mode P1.00?(For details, refer to the
function description of P1.00 in
Chapter 6)
Multi digital voltage reference?
Multi voltage reference function of
terminal X? (For details, refer to the
function description of P5.00 to P5.06 in
Chapter 6)
Setting correct
P4.15
~
P4.21
Multi frequency reference?
Multi frequency reference function of
terminal X? (For details, refer to the
function description of P5.00 to P5.06 in
Chapter 6)
Setting correct
P4.22
~
P4.36
Running command Keypad
control
Running command Terminal
control
Setting P0.06=1
Setting P0.06=0
Setting P0.0 according to
running direction (0: Forward;
1: Reverse)
Running command communicate
control, set P0.06=2
Select analog channel ?
Select analog channel ?
Setting P6.00
~
P6.20 (For
details, refer to the function
description of P6.00 to P6.20
in Chapter 6)
Setting P6.00
~
P6.20 (For
details, refer to the function
description of P6.00 to P6.20
in Chapter 6)
N
Y
N
Y
N
Y
Y
N
Y
N
N
Y
N
Y
NEXT PAGE
Vector control 1?
If vector control 2 without
encoder speed feedback?
Parameter identification (For details,
refer to setting process for parameter
auto-tuning under vector control 2 in
appendix B)
P0.03=0 (Process open loop vector
control 1)
P0.03=4 (Process open
loop vector control 2
without encoder speed
feedback)
P0.03=8 (Process close loop vector
control 2 with encoder speed feedback)
Setting Pd.21 and deceleration ratio
Pd.24 according to the number of
pulses per turn of the encoder
Y
N
Y
N







































































