





























142 Parameters
27.15
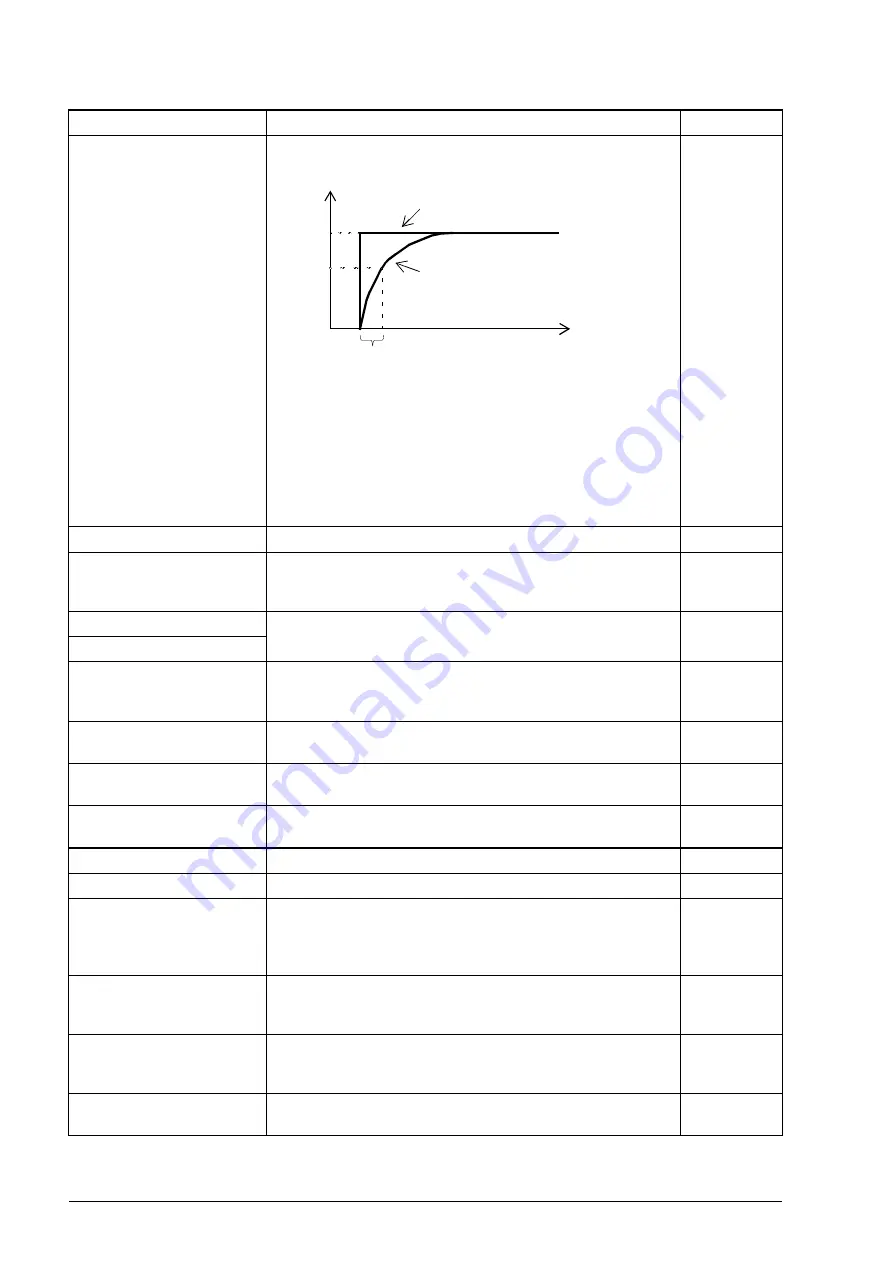
PID deriv filter
Defines the time constant of the 1-pole filter used to smooth
the derivative component of the process PID controller.
0.00 … 10.00 s
Filter time constant.
100 = 1 s
27.16
PID error inv
PID error inversion. When the source selected by this
parameter is on, the error (process setpoint – process
feedback) at the PID controller input is inverted.
Const
). -
Pointer
27.18
PID maximum
Defines the maximum limit for the PID controller output. Using
the minimum and maximum limits, it is possible to restrict the
operation range.
-32768.0 …
32768.0
Maximum limit for PID controller output.
10 = 1
27.19
PID minimum
Defines the minimum limit for the PID controller output. See
parameter
.
-32768.0 …
32768.0
Minimum limit for PID controller output.
10 = 1
27.22
Sleep mode
Activates the sleep function.
No
Sleep function inactive.
0
Internal
The sleep function is activated and deactivated automatically
as defined by parameters
and
. The sleep and wake-up delays (
) are effective.
1
External
The sleep function is activated by the source selected by
parameter
. The sleep and wake-up delays
(
and
) are effective.
2
27.23
Sleep level
Defines the start limit for the sleep function. If the motor
speed is below this value longer than the sleep delay (
), the drive shifts to sleep mode.
-32768.0 …
32768.0
Sleep start level.
10 = 1
No.
Name/Value
Description
FbEq
63
%
100
T
t
O = I × (1 - e
-t
/T
)
I = filter input (step)
O = filter output
t
= time
T = filter time constant
Unfiltered signal
Filtered signal
Summary of Contents for ACS850 series
Page 1: ...ACS850 Firmware Manual ACS850 Standard Control Program...
Page 2: ......
Page 4: ......
Page 24: ...24 Start up...
Page 28: ...28 Control locations and operating modes...
Page 252: ...252 Fieldbus control...







































































