





























Setting 19: PID Disable
Close a digital input to indefinitely disable the PID function. When the input is released, the drive resumes PID operation.
Refer to PID Block Diagram on page 209
.
Setting 1A: Accel/Decel Time Selection 2
Selects accel/decel times 1 to 4 in combination with the Accel/decel time selection 1 command.
Accel, Decel Times 1 to 4 on page 222
for details.
Setting 1B: Program Lockout
Parameter values cannot be changed when an input is programmed for Program Lockout and the input is open. It is still possible,
however, to view and monitor parameter settings.
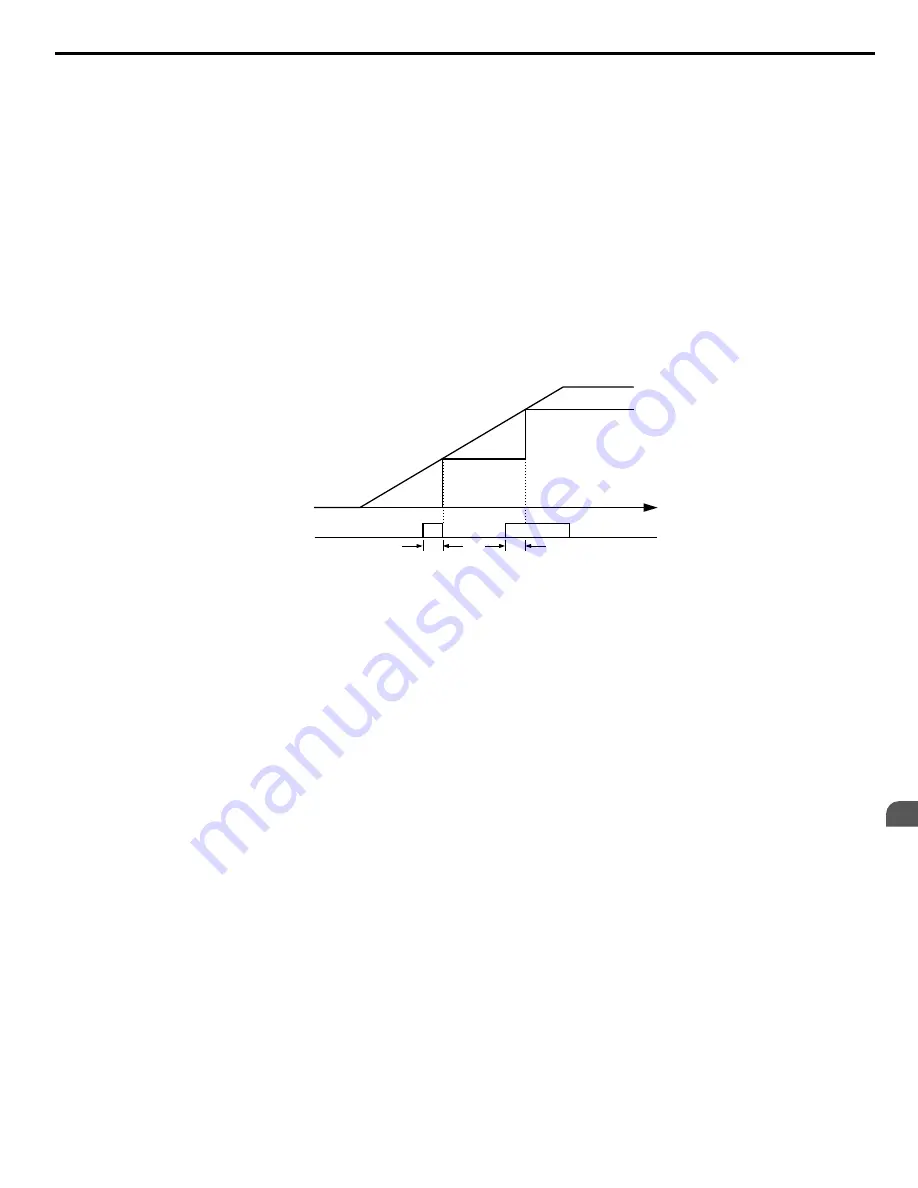
Setting 1E: Reference Sample Hold
This function allows the user to sample an analog frequency reference signal being input to terminal A1, A2, or A3 and hold
the frequency reference at the sampled level. When the Analog Frequency Reference Sample/Hold function is held for at least
100 ms, the drive reads the analog input and changes the frequency reference to the newly sampled speed as illustrated in
.
When the power is shut off and the sampled analog frequency reference is cleared, the frequency reference is reset to 0.
Frequency
Reference
Time
100 ms
Reference
Sample Hold Input
Analog Signal
100 ms
ON
OFF
Figure 5.63 Analog Frequency Reference Sample/Hold
An oPE03 error will occur when one of the following functions is used simultaneously with the Analog frequency reference
sample/hold command:
• Hold accel/decel stop (setting: A)
• Up command, Down command (setting: 10, 11)
• Offset frequency (setting: 44 to 46)
• Up or Down functions (setting: 75, 76)
Setting 20 to 2F: External Fault
The External fault command stops the drive when problems occur with external devices.
To use the External fault command, set one of the multi-function digital inputs to a value between 20 and 2F. The digital
operator will display EF
o
where
o
is the number of the terminal to which the external fault signal is assigned.
For example, if an external fault signal is input to terminal S3, “EF3” will be displayed.
Select the value to be set in H1-
oo
from a combination of any of the following three conditions:
• Signal input level from peripheral devices (N.O., N.C.)
• External fault detection method
• Operation after external fault detection
shows the relationship between the conditions and the value set to H1-
oo
:
Terminal statuses, detection conditions, and stopping methods marked with an “O” are applicable to the corresponding settings.
5.7 H: Terminal Functions
YASKAWA ELECTRIC SIEP C710636 04D U1000 Industrial MATRIX Drive Technical Manual
283
5
Parameter Details
Содержание U1000 iQpump Drive
Страница 705: ......







































































