





























5.8 L: Protection Functions
u
L1: Motor Protection
n
L1-01: Motor Overload Protection Selection
The drive has an electronic overload protection function that estimates the motor overload level based on output current, output
frequency, thermal motor characteristics, and time. When the drive detects a motor overload an oL1 fault is triggered and the
drive output shuts off.
L1-01 sets the overload protection function characteristics according to the motor being used.
No.
Name
Setting Range
Default
L1-01
Motor Overload Protection Selection
0 to 6
Determined by
A1-02
Note:
1.
When the motor protection function is enabled (L1-01≠ 0), an oL1 alarm can be output through one of the multi-function outputs by
setting H2-01 to 1F. The output closes when the motor overload level reaches 90% of the oL1 detection level.
2.
Set L1-01 to a value between 1 and 6 when running a single motor from the drive to select a method to protect the motor from overheat.
An external thermal relay is not necessary.
Setting 0: Disabled (Motor Overload Protection Is Not Provided)
Use this setting if no motor overheat protection is desired or if multiple motors are connected to a single drive. If multiple
motors are connected to a single drive, install a thermal relay for each motor as shown in
.
Thermal
relay
motor
Power supply
M1
oL1
oL2
M2
Drive
(external fault)
N.O. input
oL1
oL2
SC
S3
Figure 5.87 Example of Protection Circuit Design for Multiple Motors
NOTICE: Thermal protection cannot be provided when running multi-motors simultaneously with the same drive, or when using motors with
a relatively high current rating compared to other standard motors (such as a submersible motor). Failure to comply could result in motor
damage. Disable the electronic overload protection of the drive (L1-01 = “0: Disabled”) and protect each motor with individual motor thermal
overloads.
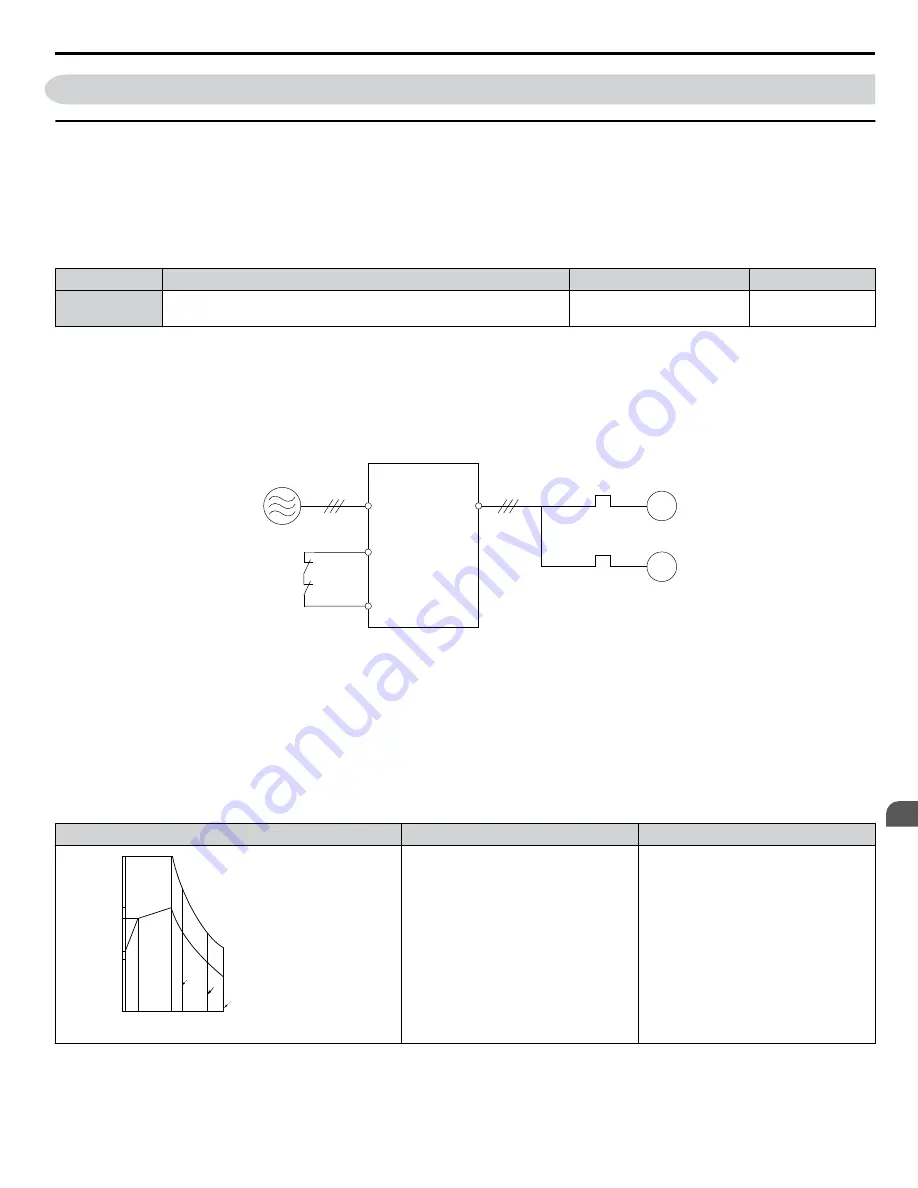
Setting 1: General-purpose Motor (Standard Self-cooled)
Because the motor is self-cooled, the overload tolerance drops when the motor speed is lowered. The drive appropriately
adjusts the electrothermal trigger point according to the motor overload characteristics, protecting the motor from overheat
throughout the entire speed range.
Overload Tolerance
Cooling Ability
Overload Characteristics
A: Max. speed for 200LJ and above
B: Max. speed for 160MJ to 180 LJ
C: Max. speed for 132MJ and below
05 33 100 120 167 200
Speed (%)
Continuous
A
B
C
Rated Speed=100% Speed
60 s
150
100
90
60
50
Torque (%)
Motor designed to operate from line
power.
Motor cooling is most effective when
running at rated base frequency (check
the motor nameplate or specifications).
Continuous operation at less than line
power frequency with 100% load can
trigger a motor overload fault (oL1). A
fault is output and the motor will coast
to stop.
Setting 2: Drive Dedicated Motor (Speed Range for Constant Torque: 1:10)
Use this setting when operating a drive duty motor that allows constant torque in a speed range of 1:10. The drive will allow
the motor to run with 100% load from 10% up to 100% speed. Running the motor below 10% speed with 100% load will
trigger an overload fault.
5.8 L: Protection Functions
YASKAWA ELECTRIC SIEP C710636 04D U1000 Industrial MATRIX Drive Technical Manual
309
5
Parameter Details
Содержание U1000 iQpump Drive
Страница 705: ......







































































