




















58
Inverter Parameter Setting Instructions
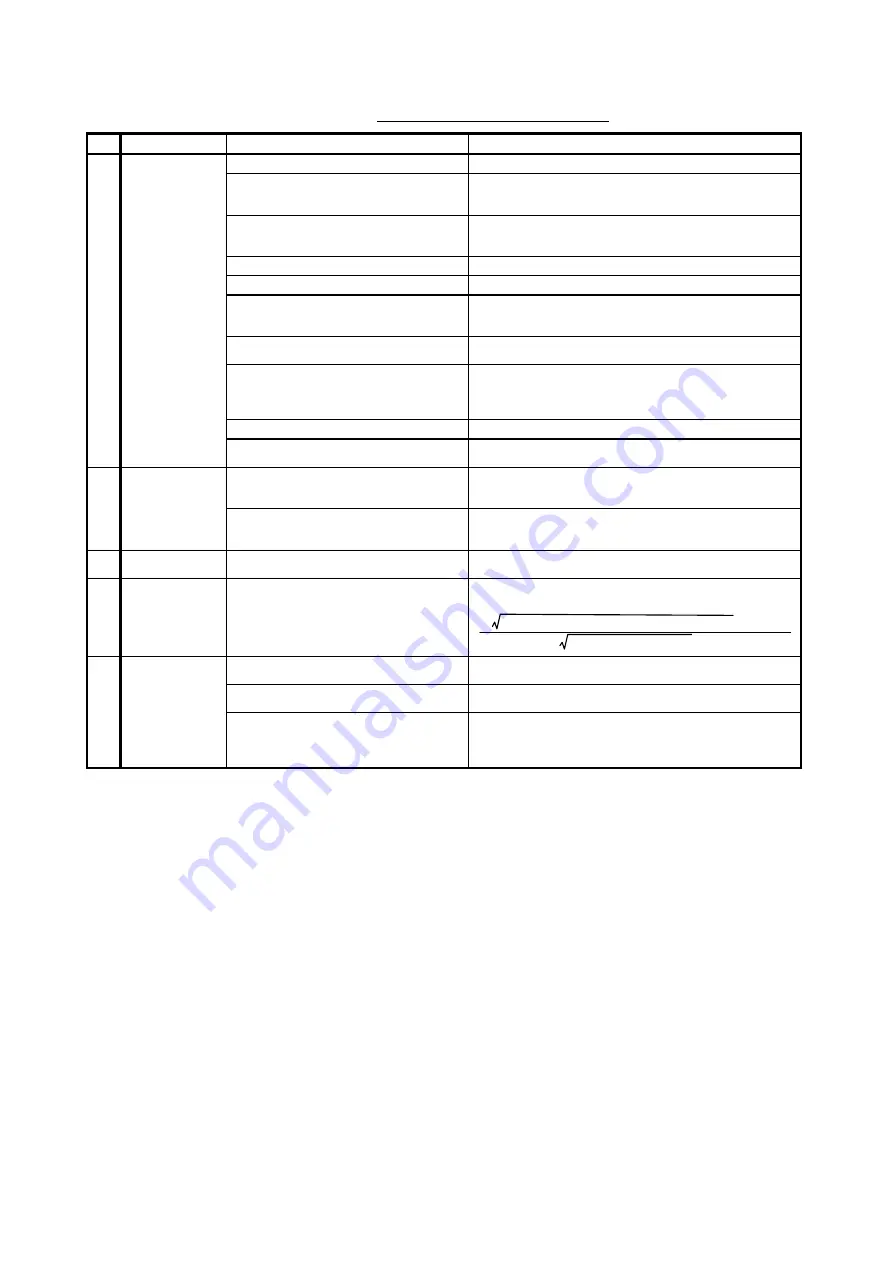
No
Contents
Parameter Number And Name
Setting Instruction
S1-01: Brake Release Frequency (FWD)
Set to 0.6Hz.
S1-02: Brake Release Frequency (REV)
Slowly increase this setting if there appears to be fluctuation when
lowering the load.
Do not set this parameter to be greater than the value in S1 -03.
S1-03: Brake Delay Frequency
Slowly increase this setting if there appears to be fluctuation when
lowering the load.
Keep this setting under 3.0Hz.
S1-05, -06: Brake Release Current
Set as high as: (E2-03) / (E2-01) × 100.
S1-07: Brake Release Torque (FWD)
Set between 80%~120%.
S1-09: Torque Forcing Amount
Set as high as 80% of L7-01 (Forward Side Torque Limit).
Increase if slipping occurs when hoisting the load at during
overload or at the rated load.
S1-12, 13: Brake Release Frequency
Refer to Appendix -1, “ Description of Parameter Calculations”.
Needs to be changed if the deceleration time is adjusted.
S1-14: Slip Prevention Frequency
Set as high as 1.5Hz.
After determining that there is no fluctuation when stopped, adjust
this parameter with 1.0Hz as the lower limit. Increase the setting if
any fluctuation occurs when stopped.
S1-15: Slip Prevention Time
Increase the time if slipping occurs when the motor is stopped.
1
Brake
Sequence
S2-03: Run Cmd Delay Timer (REV? FWD)
Refer to “6.2.2 Run Command Delay Timer (Reverse
→
Forward)” for setting description and instructions.
E1-08: Mid Output Frequency Voltage
Normally this setting is fine after performing Auto Tuning.
Set the upper limit as high as 12.6V for 200V class drives), and
25.2V for 400V class drives.
2
V/f Characteristic
E1-10: Minimum Output Frequency Voltage
Normally this setting is fine after performing Auto Tuning.
Set the upper limit as high as 4.3V for 200V class drives), and
8.6V for 400V class drives.
3
S-Curve
Characteristics
C2-01~04: S-Curve Characteristics
Set to 0.00sec.
4
Torque Limit
L7-01~04: Torque Limit
Use the following equation to determine the Upper Limit Value
from the rated current of the motor and the drive:
(Inverter Rated Current × 1.50)
2
- (E2-03)
2
× 100
(E2-01)
2
- (E2-03)
2
C4-02: Torque Compensation
Adjust this setting between 20ms and 50ms.
Increase the setting if there is excessive fluctuation.
n2-01: AFR Gain
Normally, set the gain between 1.0 and 2.0.
Slowly increase the gain if there is too much fluctuation.
5
Other
n2-02: AFR
Set as high as 50ms (default setting, normally need not be
changed). Decreasing this setting can reduce fluctuation when
lowering the load, but this may increase fluctuation when hoisting.
Set by checking fluctuation during both hoisting and lowering.
Содержание CIMR-F7Z
Страница 3: ......







































































