





























11-28
Parameterization
Rexroth IndraDrive FCS01.1
DOK-INDRV*--FCS01*****-IB01_EN-P
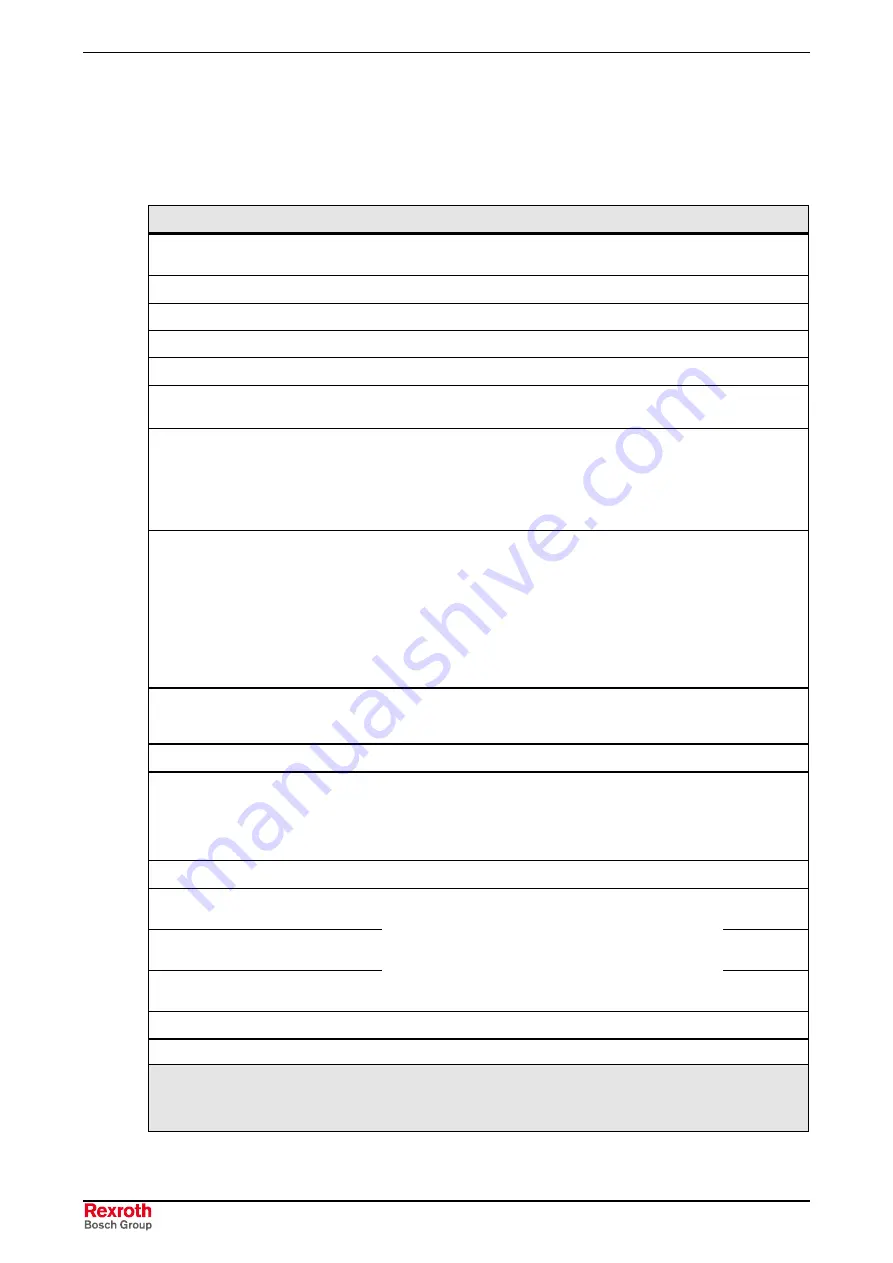
Functions pulse input: 2...22kHz (only for DIG 2 and DIG 3)
For these functions, the respective inputs evaluates the applied pulse
frequency. The frequency range 2kHz to 22kHz covers the value range 0
to 100%. The inputs act up to a maximum pulse frequency of 32kHz. The
voltage level may be between 15V and 24V and the duty-cycle between
50% and 80%.
Value
Function
Description
Signal
26
Torque current limit
2
Adjustable load limit; when it is reached, the output
frequency is reduced.
→
P112
Pulses
27
Actual frequency PID
2 3
Potential actual value feedback for PID controller
Pulses
28
Frequency addition
2 3
Addition to other frequency setpoint values
Pulses
29
Frequency subtraction
2 3
Subtraction from other frequency setpoint values
Pulses
33
Current limit
2
based on the set current limit (P536), it can be
modified via the digital/analog input.
Pulses
34
Maximum frequency
2
In analog range, the maximum frequency of the FU is
set. 100% corresponds to the setting in parameter
P411. 0% corresponds to the setting in parameter
P410. The value cannot fall below the values for the
min./max. output frequency (P104/P105) or exceed
them.
Pulses
35
Actual frequency PID
controller limited
2 3
is needed to establish a control loop. The analog input
(actual value) is compared to the setpoint value (e.g.
another analog input, or fixed frequency). The output
frequency is adjusted as far as possible until the
actual value has approached the setpoint.
(see controlled variables P413 - P416).
The output frequency cannot fall below the
programmed value of the minimum frequency in
parameter P104. (no rotation direction reversal)
Pulses
36
Actual frequency PID
controller monitored
2 3
same as function 35 >Actual frequency PID<, but the
FC will switch off the output frequency when the
>minimum frequency< P104 has been reached.
Pulses
37
reserved
Pulses
38
Rate-action torque
2
this function allows for teaching the controller in
advance a value for the torque requirement
(feedforward control). In lifting gears with separate
load sensing function, this function can be used to
ensure better load transfer.
→
P214
Pulses
39
Multiplication
3
This factor multiplies the main setpoint value.
Pulses
40
PI actual value process
controller
Pulses
41
PI setpoint value process
controller
Pulses
42
PI rate-action process
controller
same as P400 = 14-16
For more details on the process controller, also see
Chapter 14.2, Process Controller.
Pulses
2
This also applies in case of control via BUS (RS232, RS485, CANopen, DeviceNet, Profibus,)
3
The limits of these values are determined by the parameter >Minimum frequency secondary setpoints< P410 and
the parameter >Maximum frequency secondary setpoints< P411.
Содержание IndraDrive Fc FCS01
Страница 28: ...5 2 Delivery Rexroth IndraDrive FCS01 1 DOK INDRV FCS01 IB01_EN P ...
Страница 34: ...6 6 Certifications and Types Rexroth IndraDrive FCS01 1 DOK INDRV FCS01 IB01_EN P ...
Страница 56: ...8 20 Installation Rexroth IndraDrive FCS01 1 DOK INDRV FCS01 IB01_EN P ...
Страница 88: ...10 4 Commissioning Rexroth IndraDrive FCS01 1 DOK INDRV FCS01 IB01_EN P ...
Страница 237: ......







































































