





























3 - 31
Chapter 3 Specifications and Functions
2
A
L1
L2
L3
U
W
V
L11
L21
CN1A
CN1B
DICOM
ALM
EM2/1
DOCOM
MR-J4-B
Ra2
SM
24VDC
U
V
W
Ground
Electro-
magnetic
brake
0
B
L1
L2
L3
U
W
V
L11
L21
CN1A
CN1B
DICOM
ALM
EM2/1
DOCOM
MR-J4-B
Ra3
SM
24VDC
U
V
W
Ground
Electro-
magnetic
brake
1
C
L1
L2
L3
U
W
V
L11
L21
CN1A
CN1B
DICOM
ALM
EM2/1
DOCOM
MR-J4-B
Ra4
SM
24VDC
U
V
W
Ground
Electro-
magnetic
brake
MC3
SSCNET (/H)
3
4
2
3
4
2
3
4
2
6
Ra2
Ra3
Ra4
MCCB4
MC2
6
MCCB3
MC1
6
MCCB2
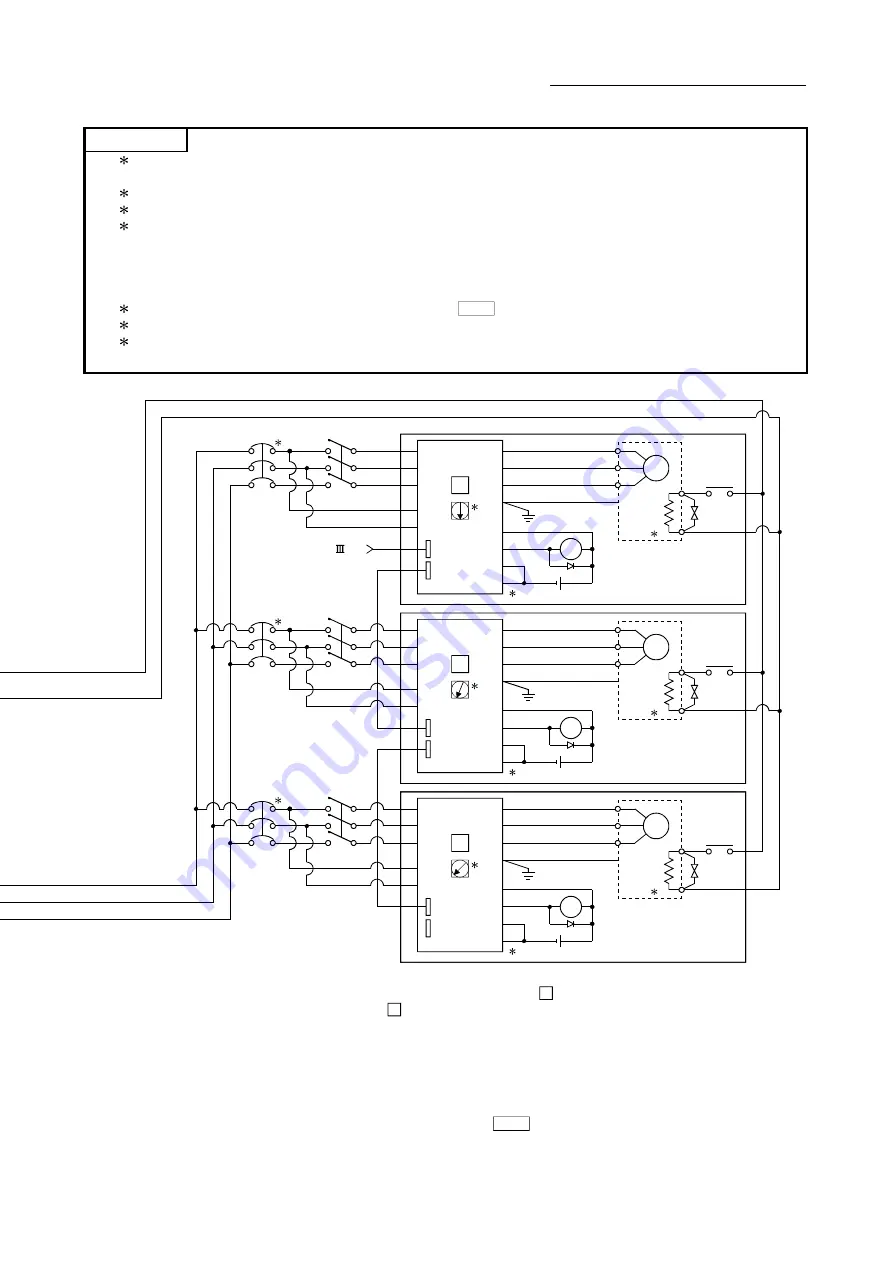
POINT
(1) 1: Configure up the power supply circuit which switch off the electromagnetic contactor (MC) after detection alarm occurrence on
the PLC CPU.
(2) 2: It is also possible to use a full wave rectified power supply as the power supply for the electromagnetic brake.
(3) 3: It is also possible to use forced stop signal of the servo amplifier.
(4) 4: Set the rotary axis setting switch of servo amplifier as follows to set the axis No. of servo amplifier.
• Axis 1: 0
• Axis 5: 4
• Axis 9: 8
• Axis 13: C
• Axis 2: 1
• Axis 6: 5
• Axis 10: 9
• Axis 14: D
• Axis 3: 2
• Axis 7: 6
• Axis 11: A
• Axis 15: E
• Axis 4: 3
• Axis 8: 7
• Axis 12: B
• Axis 16: F
(5) 5: The status of forced stop input signal can be confirmed with " Md.50
Forced stop input".
(6) 6: Refer to the servo amplifier instruction manual for selection of the circuit breaker and electromagnetic contactor.
(7) 7: The surge suppressor is recommended to be used for an AC relay or electromagnetic contactor (MC) near the servo amplifier.
Refer to the servo amplifier instruction manual for selection of the circuit breakers and magnetic contractors for wiring.
(Note-1) : When the control power supply of servo amplifier is shut off, it is not possible to communicate with the servo amplifier after that.
Example) When the control power supply L11/L21 of servo amplifier in above
B
figure is shut off, it is also not possible to
communicate with the servo amplifier
C
.
If only a specific servo amplifier main circuit power supply is shut off, be sure to shut off the main circuit power supply
L1/L2/L3, and do not shut off the control power supply L11/L21.
(Note-2) : Be sure to shut off the both of main circuit power supply L1/L2/L3 and control power supply L11/L21 after disconnection of
SSCNET communication by the connect/disconnect function of SSCNET communication at the time of exchange of servo
amplifier. At this time, it is not possible to communicate between the servo amplifier and QD77MS. Therefore, be sure to
exchange the servo amplifier after stopping the operating of machine beforehand.
(Note-3) : If the emergency stop signal of QD77MS turns OFF when setting of "
Pr.82
Forced stop valid/invalid selection" to "0 : Valid",
servomotor is stopped with dynamic brake. (The LED display of servo amplifier indicates "E7.1" (Controller forced stop input
warning).)
Содержание MELSEC-Q QD77MS
Страница 1: ......
Страница 27: ...A 26 MEMO...
Страница 29: ...MEMO...
Страница 101: ...3 34 Chapter 3 Specifications and Functions MEMO...
Страница 232: ...5 111 Chapter 5 Data Used for Positioning Control MEMO...
Страница 315: ...5 194 Chapter 5 Data Used for Positioning Control MEMO...
Страница 337: ...6 22 Chapter 6 Sequence Program Used for Positioning Control...
Страница 338: ...6 23 Chapter 6 Sequence Program Used for Positioning Control...
Страница 339: ...6 24 Chapter 6 Sequence Program Used for Positioning Control...
Страница 340: ...6 25 Chapter 6 Sequence Program Used for Positioning Control...
Страница 341: ...6 26 Chapter 6 Sequence Program Used for Positioning Control...
Страница 342: ...6 27 Chapter 6 Sequence Program Used for Positioning Control...
Страница 343: ...6 28 Chapter 6 Sequence Program Used for Positioning Control...
Страница 344: ...6 29 Chapter 6 Sequence Program Used for Positioning Control...
Страница 345: ...6 30 Chapter 6 Sequence Program Used for Positioning Control...
Страница 346: ...6 31 Chapter 6 Sequence Program Used for Positioning Control...
Страница 347: ...6 32 Chapter 6 Sequence Program Used for Positioning Control...
Страница 348: ...6 33 Chapter 6 Sequence Program Used for Positioning Control...
Страница 349: ...6 34 Chapter 6 Sequence Program Used for Positioning Control...
Страница 353: ...6 38 Chapter 6 Sequence Program Used for Positioning Control...
Страница 354: ...6 39 Chapter 6 Sequence Program Used for Positioning Control...
Страница 357: ...6 42 Chapter 6 Sequence Program Used for Positioning Control...
Страница 359: ...6 44 Chapter 6 Sequence Program Used for Positioning Control...
Страница 360: ...6 45 Chapter 6 Sequence Program Used for Positioning Control...
Страница 361: ...6 46 Chapter 6 Sequence Program Used for Positioning Control...
Страница 363: ...6 48 Chapter 6 Sequence Program Used for Positioning Control...
Страница 364: ...6 49 Chapter 6 Sequence Program Used for Positioning Control...
Страница 413: ...MEMO...
Страница 433: ...8 20 Chapter 8 OPR Control MEMO...
Страница 458: ...9 25 Chapter 9 Major Positioning Control MEMO...
Страница 593: ...10 30 Chapter 10 High Level Positioning Control MEMO...
Страница 625: ...11 32 Chapter 11 Manual Control MEMO...
Страница 659: ...12 34 Chapter 12 Expansion Control MEMO...
Страница 767: ...13 108 Chapter 13 Control Sub Functions MEMO...
Страница 813: ...14 46 Chapter 14 Common Functions MEMO...
Страница 831: ...15 18 Chapter 15 Dedicated Instructions MEMO...
Страница 846: ...16 15 Chapter 16 Troubleshooting MEMO...
Страница 892: ...16 61 Chapter 16 Troubleshooting MEMO...
Страница 971: ...Appendix 62 Appendices MEMO...
Страница 974: ......
Страница 975: ......







































































