





























14 - 16
Chapter 14 Common Functions
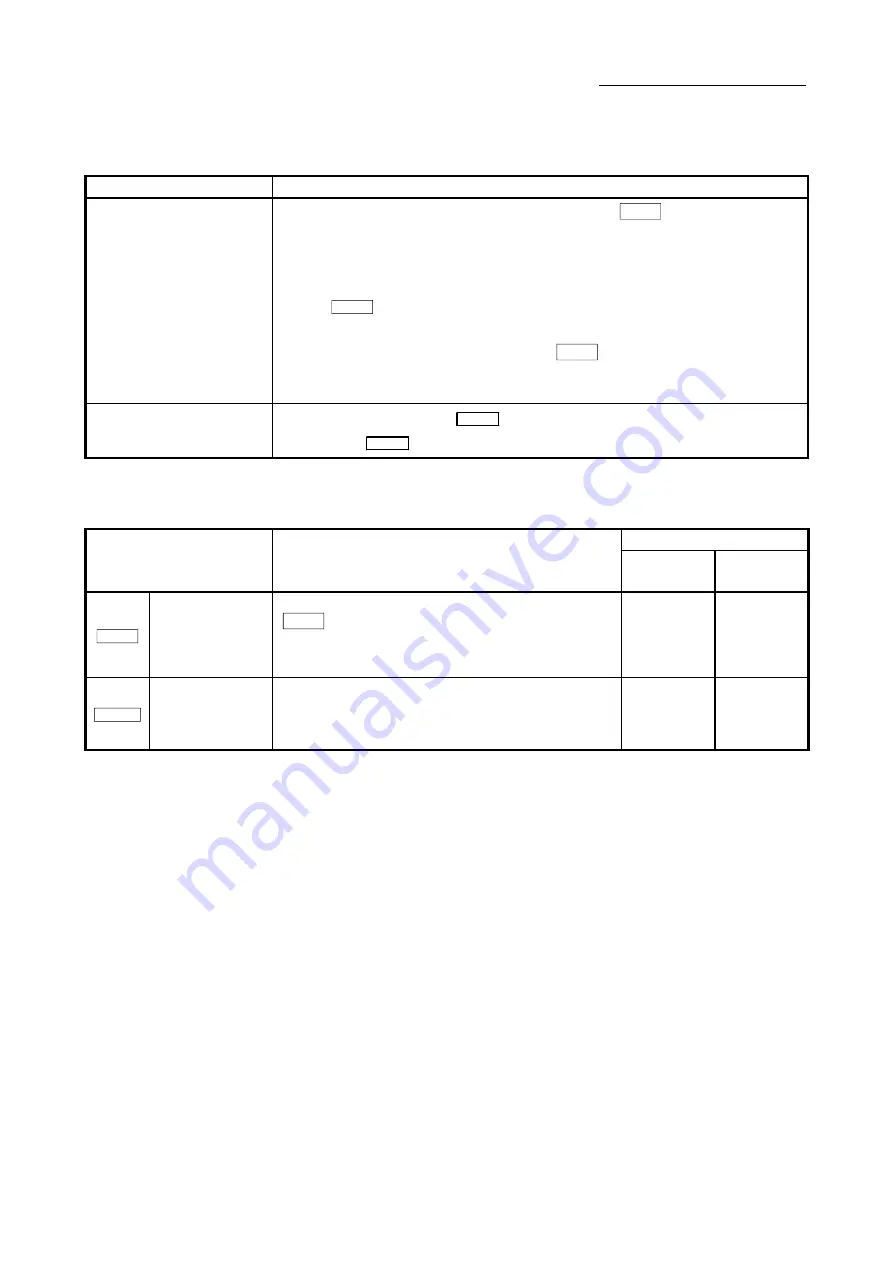
(2) The operation of following function differ from the normal operation mode
during amplifier-less operation mode.
Function Operation
External signal selection
function
When "1: External input signal of servo amplifier" is set in " Pr.80 External input signal
selection", the status of external signal at the amplifier-less operation mode start is shown
below.
• Upper/lower limit signal (FLS, RLS): ON
• Near-point dog signal (DOG): OFF
Change " Md.30 External input signal" to change the signal status.
(Refer to "Restrictions (3)" for details.)
When "2: Buffer memory of QD77MS" is set in " Pr.80 External input signal selection",
the upper/lower limit signal (FLS, RLS) and near-point dog signal (DOG) follow the buffer
memory status of QD77MS during amplifier-less operation mode.
Torque limit function
Turning ON/OFF torque limit ("
Md.108 Servo status
" high-order buffer memory address: b13)
depending on "
Md.104
Motor current value
". (Refer to "Restrictions (3)" for details.)
(3) The operation of following monitor data differ from the normal operation
mode during amplifier-less operation mode.
Buffer memory address
Storage item
Storage details
QD77MS2
QD77MS4
QD77MS16
Md.30
External input
signal
When "1: External input signal of servo amplifier" is set in
" Pr.80 External input signal selection", the external input
signal status can be operated by turning ON/OFF the "b0:
Lower limit signal", "b1: Upper limit signal" or "b6: Near-
point dog signal" during amplifier-less operation mode.
816+100n 2416+100n
Md.104 Motor current value
"0" is set at the amplifier-less operation mode start.
The motor current value can be emulated by changing this
monitor data in user side during amplifier-less operation
mode.
856+100n 2456+100n
n: Axis No.-1
(4) When the power supply is turned OFF
→
ON or PLC CPU is reset during
amplifier-less operation mode, the mode is switched to the normal operation
mode.
(5) The operation of servo motor or the timing of operation cycle ,etc. at the
amplifier-less operation is different from the case where the servo amplifiers
are connected at the normal operation mode. Confirm the operation finally
with a real machine.
(6) The amplifier-less operation cannot be used in the test mode. Do not
request to switch to the amplifier-less operation mode during test mode.
(7) The amplifier-less operation cannot be used in the fully closed loop system,
linear servo or direct drive motor.
Содержание MELSEC-Q QD77MS
Страница 1: ......
Страница 27: ...A 26 MEMO...
Страница 29: ...MEMO...
Страница 101: ...3 34 Chapter 3 Specifications and Functions MEMO...
Страница 232: ...5 111 Chapter 5 Data Used for Positioning Control MEMO...
Страница 315: ...5 194 Chapter 5 Data Used for Positioning Control MEMO...
Страница 337: ...6 22 Chapter 6 Sequence Program Used for Positioning Control...
Страница 338: ...6 23 Chapter 6 Sequence Program Used for Positioning Control...
Страница 339: ...6 24 Chapter 6 Sequence Program Used for Positioning Control...
Страница 340: ...6 25 Chapter 6 Sequence Program Used for Positioning Control...
Страница 341: ...6 26 Chapter 6 Sequence Program Used for Positioning Control...
Страница 342: ...6 27 Chapter 6 Sequence Program Used for Positioning Control...
Страница 343: ...6 28 Chapter 6 Sequence Program Used for Positioning Control...
Страница 344: ...6 29 Chapter 6 Sequence Program Used for Positioning Control...
Страница 345: ...6 30 Chapter 6 Sequence Program Used for Positioning Control...
Страница 346: ...6 31 Chapter 6 Sequence Program Used for Positioning Control...
Страница 347: ...6 32 Chapter 6 Sequence Program Used for Positioning Control...
Страница 348: ...6 33 Chapter 6 Sequence Program Used for Positioning Control...
Страница 349: ...6 34 Chapter 6 Sequence Program Used for Positioning Control...
Страница 353: ...6 38 Chapter 6 Sequence Program Used for Positioning Control...
Страница 354: ...6 39 Chapter 6 Sequence Program Used for Positioning Control...
Страница 357: ...6 42 Chapter 6 Sequence Program Used for Positioning Control...
Страница 359: ...6 44 Chapter 6 Sequence Program Used for Positioning Control...
Страница 360: ...6 45 Chapter 6 Sequence Program Used for Positioning Control...
Страница 361: ...6 46 Chapter 6 Sequence Program Used for Positioning Control...
Страница 363: ...6 48 Chapter 6 Sequence Program Used for Positioning Control...
Страница 364: ...6 49 Chapter 6 Sequence Program Used for Positioning Control...
Страница 413: ...MEMO...
Страница 433: ...8 20 Chapter 8 OPR Control MEMO...
Страница 458: ...9 25 Chapter 9 Major Positioning Control MEMO...
Страница 593: ...10 30 Chapter 10 High Level Positioning Control MEMO...
Страница 625: ...11 32 Chapter 11 Manual Control MEMO...
Страница 659: ...12 34 Chapter 12 Expansion Control MEMO...
Страница 767: ...13 108 Chapter 13 Control Sub Functions MEMO...
Страница 813: ...14 46 Chapter 14 Common Functions MEMO...
Страница 831: ...15 18 Chapter 15 Dedicated Instructions MEMO...
Страница 846: ...16 15 Chapter 16 Troubleshooting MEMO...
Страница 892: ...16 61 Chapter 16 Troubleshooting MEMO...
Страница 971: ...Appendix 62 Appendices MEMO...
Страница 974: ......
Страница 975: ......







































































