





























9 - 2
Chapter 9 Major Positioning Control
9.1 Outline of major positioning controls
"Major positioning controls" are carried out using the "positioning data" stored in the
QD77MS.
The basic controls such as position control and speed control are executed by setting
the required items in this "positioning data", and then starting that positioning data.
The control system for the "major positioning controls" is set in setting item "
Da.2
Control system
" of the positioning data.
Control defined as a "major positioning control" carries out the following types of
control according to the "
Da.2
Control system
" setting.
However, the position loop is included for commanding to servo amplifier in the speed
control set in "
Da.2
Control system
".
Use the "speed-torque control" (Refer to Section 12.1 "Speed-torque control") to
execute the speed control not including position loop.
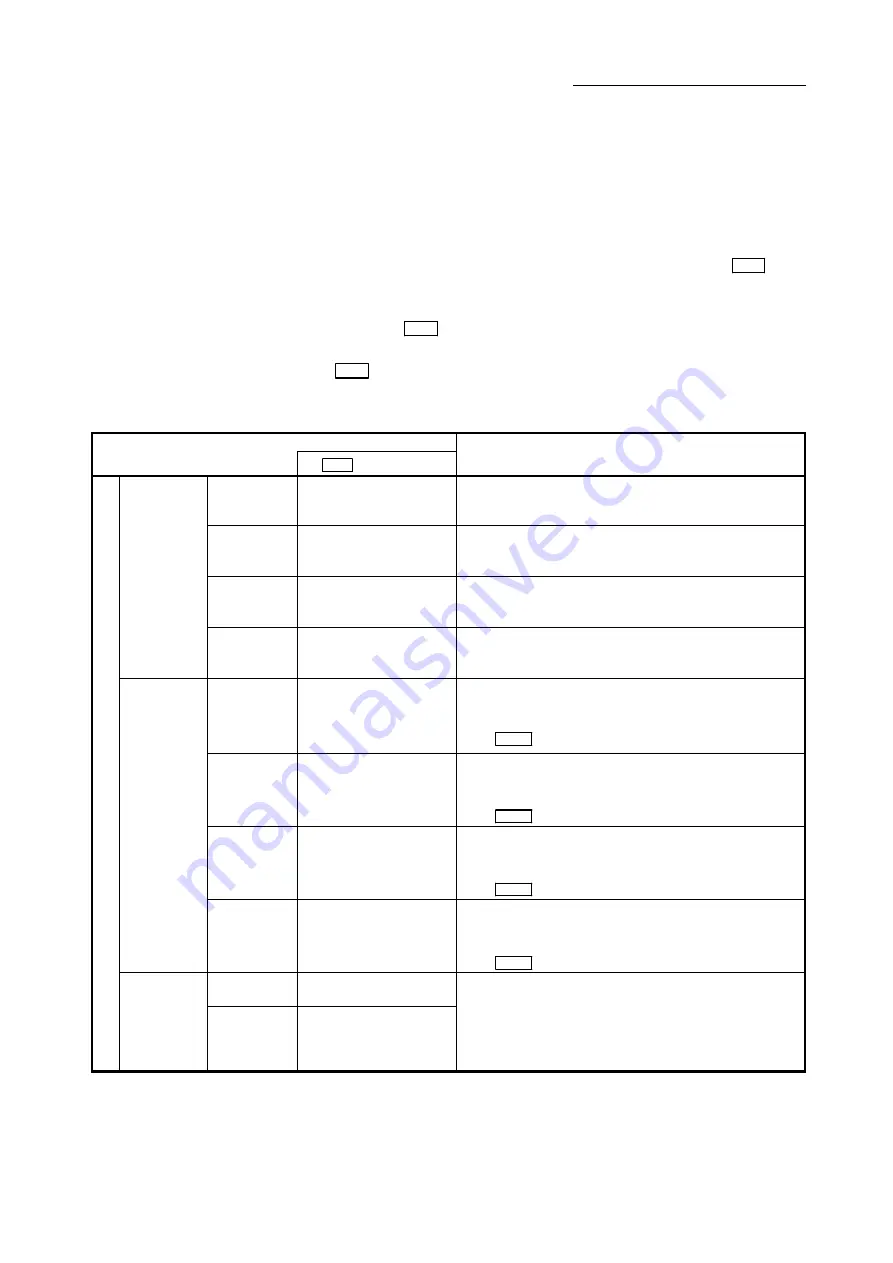
Major positioning control
Da.2
Control system
Details
1-axis linear
control
ABS Linear 1
INC Linear 1
Positioning of the designated 1 axis is carried out from the
start address (current stop position) to the designated
position.
2-axis linear
interpolation
control
(Note-1)
ABS Linear 2
INC Linear 2
Using the designated 2 axes, linear interpolation control is
carried out from the start address (current stop position) to
the designated position.
3-axis linear
interpolation
control
(Note-1)
ABS Linear 3
INC Linear 3
Using the designated 3 axes, linear interpolation control is
carried out from the start address (current stop position) to
the designated position.
Linear control
4-axis linear
interpolation
control
(Note-1)
ABS Linear 4
INC Linear 4
Using the designated 4 axes, linear interpolation control is
carried out from the start address (current stop position) to
the designated position.
1-axis fixed-
feed control
Fixed-feed 1
Positioning of the designated 1 axis is carried out for a
designated movement amount from the start address
(current stop position).
(The "
Md.20
Current feed value
" is set to "0" at the start.)
2-axis fixed-
feed control
(Note-1)
Fixed-feed 2
Using the designated 2 axes, linear interpolation control is
carried out for a designated movement amount from the
start address (current stop position).
(The "
Md.20
Current feed value
" is set to "0" at the start.)
3-axis fixed-
feed control
(Note-1)
Fixed-feed 3
Using the designated 3 axes, linear interpolation control is
carried out for a designated movement amount from the
start address (current stop position).
(The "
Md.20
Current feed value
" is set to "0" at the start.)
Fixed-feed
control
4-axis fixed-
feed control
(Note-1)
Fixed-feed 4
Using the designated 4 axes, linear interpolation control is
carried out for a designated movement amount from the
start address (current stop position).
(The "
Md.20
Current feed value
" is set to "0" at the start.)
Sub point
designation
ABS Circular sub
INC Circular sub
Position control
2-axis circular
interpolation
control
(Note-1)
Center point
designation
ABS Circular right
ABS Circular left
INC Circular right
INC Circular left
Using the designated 2 axes, positioning is carried out in
an arc path to a position designated from the start point
address (current stop position).
Содержание MELSEC-Q QD77MS
Страница 1: ......
Страница 27: ...A 26 MEMO...
Страница 29: ...MEMO...
Страница 101: ...3 34 Chapter 3 Specifications and Functions MEMO...
Страница 232: ...5 111 Chapter 5 Data Used for Positioning Control MEMO...
Страница 315: ...5 194 Chapter 5 Data Used for Positioning Control MEMO...
Страница 337: ...6 22 Chapter 6 Sequence Program Used for Positioning Control...
Страница 338: ...6 23 Chapter 6 Sequence Program Used for Positioning Control...
Страница 339: ...6 24 Chapter 6 Sequence Program Used for Positioning Control...
Страница 340: ...6 25 Chapter 6 Sequence Program Used for Positioning Control...
Страница 341: ...6 26 Chapter 6 Sequence Program Used for Positioning Control...
Страница 342: ...6 27 Chapter 6 Sequence Program Used for Positioning Control...
Страница 343: ...6 28 Chapter 6 Sequence Program Used for Positioning Control...
Страница 344: ...6 29 Chapter 6 Sequence Program Used for Positioning Control...
Страница 345: ...6 30 Chapter 6 Sequence Program Used for Positioning Control...
Страница 346: ...6 31 Chapter 6 Sequence Program Used for Positioning Control...
Страница 347: ...6 32 Chapter 6 Sequence Program Used for Positioning Control...
Страница 348: ...6 33 Chapter 6 Sequence Program Used for Positioning Control...
Страница 349: ...6 34 Chapter 6 Sequence Program Used for Positioning Control...
Страница 353: ...6 38 Chapter 6 Sequence Program Used for Positioning Control...
Страница 354: ...6 39 Chapter 6 Sequence Program Used for Positioning Control...
Страница 357: ...6 42 Chapter 6 Sequence Program Used for Positioning Control...
Страница 359: ...6 44 Chapter 6 Sequence Program Used for Positioning Control...
Страница 360: ...6 45 Chapter 6 Sequence Program Used for Positioning Control...
Страница 361: ...6 46 Chapter 6 Sequence Program Used for Positioning Control...
Страница 363: ...6 48 Chapter 6 Sequence Program Used for Positioning Control...
Страница 364: ...6 49 Chapter 6 Sequence Program Used for Positioning Control...
Страница 413: ...MEMO...
Страница 433: ...8 20 Chapter 8 OPR Control MEMO...
Страница 458: ...9 25 Chapter 9 Major Positioning Control MEMO...
Страница 593: ...10 30 Chapter 10 High Level Positioning Control MEMO...
Страница 625: ...11 32 Chapter 11 Manual Control MEMO...
Страница 659: ...12 34 Chapter 12 Expansion Control MEMO...
Страница 767: ...13 108 Chapter 13 Control Sub Functions MEMO...
Страница 813: ...14 46 Chapter 14 Common Functions MEMO...
Страница 831: ...15 18 Chapter 15 Dedicated Instructions MEMO...
Страница 846: ...16 15 Chapter 16 Troubleshooting MEMO...
Страница 892: ...16 61 Chapter 16 Troubleshooting MEMO...
Страница 971: ...Appendix 62 Appendices MEMO...
Страница 974: ......
Страница 975: ......







































































