





























9 - 58
Chapter 9 Major Positioning Control
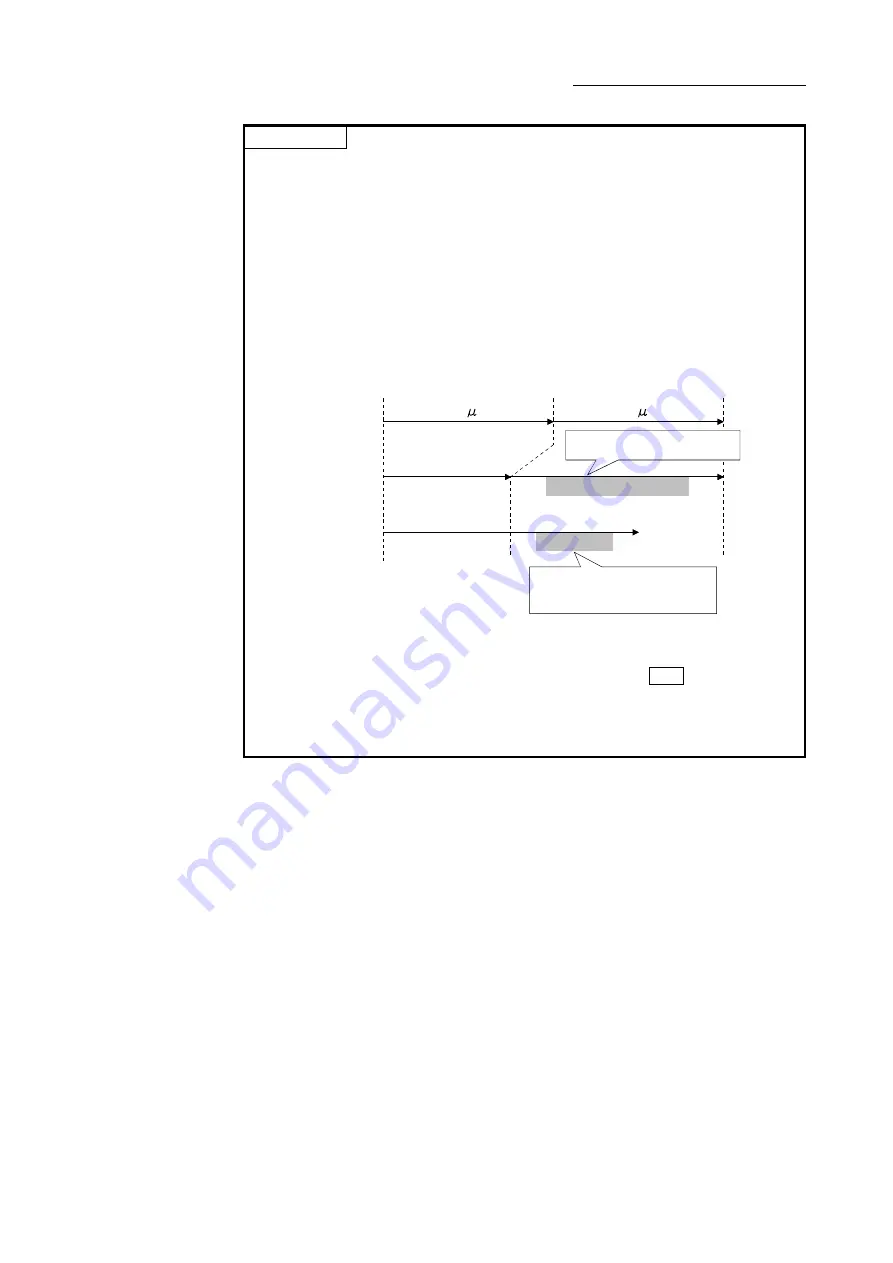
POINTS
•
When the movement amount is converted to the actual number of command
pulses, a fraction appears after the decimal point, according to the movement
amount per pulse. This fraction is normally retained in the QD77MS and reflected
at the next positioning.
For the fixed-feed control, since the movement distance is maintained constant (=
the command number of pulses is maintained constant), the control is carried out
after the fraction pulse is cleared to zero at start.
[Accumulation/cutoff for fractional pulses]
When movement amount per pulse is 1.0 [
μ
m] and movement for 2.5 [
μ
m] is
executed two times.
→
Conversion to command pulses: 2.5 [
μ
m] ÷ 1.0 = 2.5 [PLS]
2PLS
2PLS
2PLS
3PLS(=2.5+0.5)
Movement
amount
0.5 PLS hold by the QD77MS is
carried to next positioning.
INC Linear 1
Fixed-feed 1
0.5 PLS hold by the QD77MS is
cleared to 0 at start and not
carried to next positioning.
2.5 m
2.5 m
•
When the "reference axis speed" is set during 3-axis fixed-feed control, set so the
major axis side becomes the reference axis. If the minor axis side is set as the
reference axis, the major axis side speed may exceed the "
Pr.8
Speed limit
value".
•
Refer to Section 9.1.6 "Interpolation control" for the reference axis and
interpolation axis combinations.
Содержание MELSEC-Q QD77MS
Страница 1: ......
Страница 27: ...A 26 MEMO...
Страница 29: ...MEMO...
Страница 101: ...3 34 Chapter 3 Specifications and Functions MEMO...
Страница 232: ...5 111 Chapter 5 Data Used for Positioning Control MEMO...
Страница 315: ...5 194 Chapter 5 Data Used for Positioning Control MEMO...
Страница 337: ...6 22 Chapter 6 Sequence Program Used for Positioning Control...
Страница 338: ...6 23 Chapter 6 Sequence Program Used for Positioning Control...
Страница 339: ...6 24 Chapter 6 Sequence Program Used for Positioning Control...
Страница 340: ...6 25 Chapter 6 Sequence Program Used for Positioning Control...
Страница 341: ...6 26 Chapter 6 Sequence Program Used for Positioning Control...
Страница 342: ...6 27 Chapter 6 Sequence Program Used for Positioning Control...
Страница 343: ...6 28 Chapter 6 Sequence Program Used for Positioning Control...
Страница 344: ...6 29 Chapter 6 Sequence Program Used for Positioning Control...
Страница 345: ...6 30 Chapter 6 Sequence Program Used for Positioning Control...
Страница 346: ...6 31 Chapter 6 Sequence Program Used for Positioning Control...
Страница 347: ...6 32 Chapter 6 Sequence Program Used for Positioning Control...
Страница 348: ...6 33 Chapter 6 Sequence Program Used for Positioning Control...
Страница 349: ...6 34 Chapter 6 Sequence Program Used for Positioning Control...
Страница 353: ...6 38 Chapter 6 Sequence Program Used for Positioning Control...
Страница 354: ...6 39 Chapter 6 Sequence Program Used for Positioning Control...
Страница 357: ...6 42 Chapter 6 Sequence Program Used for Positioning Control...
Страница 359: ...6 44 Chapter 6 Sequence Program Used for Positioning Control...
Страница 360: ...6 45 Chapter 6 Sequence Program Used for Positioning Control...
Страница 361: ...6 46 Chapter 6 Sequence Program Used for Positioning Control...
Страница 363: ...6 48 Chapter 6 Sequence Program Used for Positioning Control...
Страница 364: ...6 49 Chapter 6 Sequence Program Used for Positioning Control...
Страница 413: ...MEMO...
Страница 433: ...8 20 Chapter 8 OPR Control MEMO...
Страница 458: ...9 25 Chapter 9 Major Positioning Control MEMO...
Страница 593: ...10 30 Chapter 10 High Level Positioning Control MEMO...
Страница 625: ...11 32 Chapter 11 Manual Control MEMO...
Страница 659: ...12 34 Chapter 12 Expansion Control MEMO...
Страница 767: ...13 108 Chapter 13 Control Sub Functions MEMO...
Страница 813: ...14 46 Chapter 14 Common Functions MEMO...
Страница 831: ...15 18 Chapter 15 Dedicated Instructions MEMO...
Страница 846: ...16 15 Chapter 16 Troubleshooting MEMO...
Страница 892: ...16 61 Chapter 16 Troubleshooting MEMO...
Страница 971: ...Appendix 62 Appendices MEMO...
Страница 974: ......
Страница 975: ......







































































