





























2 - 3
Chapter 2 System Configuration
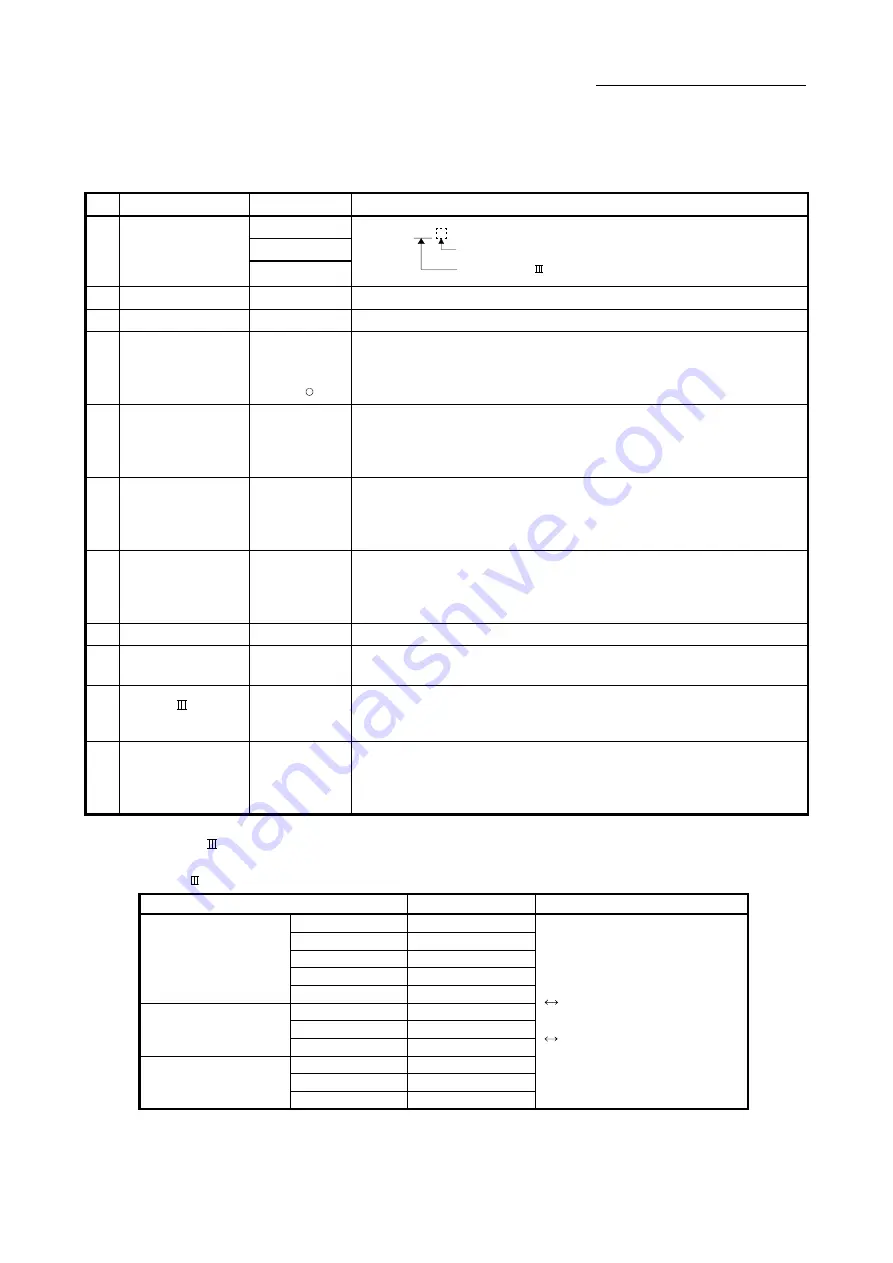
2.2 Component list
The positioning system using the QD77MS is configured of the following devices.
No. Part
name
Type
Remarks
QD77MS2
QD77MS4
1
Simple Motion
module
QD77MS16
QD77MS
Number of control axes
MS: SSCNET (/H)model
2 GX Works2
(Note-1)
–
Refer to the "GX Works2 Version1 Operating Manual (Common)" for details.
3 MR
Configurator2
–
Refer to the help of MR Configurator2 for details.
4 Personal
computer
Personal
computer which
supports
Windows
R
(Prepared by user)
Refer to the "GX Works2 Version1 Operating Manual (Common)" for details.
5 RS-232
cable
QC30R2
(Prepared by user)
An RS-232 cable is needed for connecting the CPU module with a personal
computer.
Refer to the "GX Works2 Version1 Operating Manual (Common)" for details.
6 USB
cable
–
(Prepared by user)
A USB cable is needed for connecting the CPU module with a personal
computer.
Refer to the "GX Works2 Version1 Operating Manual (Common)" for details.
7 Ethernet
cable
–
(Prepared by user)
An Ethernet cable is needed for connecting the CPU module with a personal
computer. Refer to the "GX Works2 Version1 Operating Manual (Common)"
for details.
8 Servo
amplifier
–
(Prepared by user)
9
Manual pulse
generator
–
(Prepared by user)
Recommended: MR-HDP01 (Mitsubishi Electric)
10
SSCNET
cable
(Note-2)
–
(Prepared by user)
Cables are needed to connect the QD77MS with the servo amplifier, or
between servo amplifiers.
11
External input signal
cable
(Note-2)
–
(Prepared by user)
Cables are needed to connect the QD77MS with the external device.
(Prepare them referring to the manuals for the connected devices and
information given in 3.4.2 of this manual.)
(Note-1): Refer to the "GX Works2 Version1 Operating Manual (Common)" for details.
(Note-2): The SSCNET cable connecting the QD77MS and servo amplifier, or between servo amplifiers, external input signal connector
has been prepared.
[SSCNET cable]
Model name
Cable length [m(ft.)]
Description
MR-J3BUS015M 0.15
(0.49)
MR-J3BUS03M 0.3
(0.98)
MR-J3BUS05M 0.5
(1.64)
MR-J3BUS1M 1
(3.28)
MR-J3BUS
M
(Note-3)
(Standard cord for inside
panel)
MR-J3BUS3M 3
(9.84)
MR-J3BUS5M-A 5
(16.40)
MR-J3BUS10M-A 10
(32.81)
MR-J3BUS
M-A
(Note-3)
(Standard cable for outside
panel)
MR-J3BUS20M-A 20
(65.62)
MR-J3BUS30M-B 30
(98.43)
MR-J3BUS40M-B 40
(131.23)
MR-J3BUS
M-B
(Note-3)
(Long distance cable)
MR-J3BUS50M-B 50
(164.04)
• QD77MS
MR-J4(W)-B/MR-J3(W)-B
• MR-J4(W)-B/MR-J3(W)-B
MR-J4(W)-B/MR-J3(W)-B
(Note-3):
= Cable length
(015: 0.15m (0.49ft.), 03: 0.3m (0.98ft.), 05: 0.5m (1.64ft.), 1: 1m (3.28ft.), 3: 3m (9.84ft.), 5: 5m (16.40ft.),
10: 10m (32.81ft.), 20: 20m (65.62ft.), 30: 30m (98.43ft.), 40: 40m (131.23ft.), 50: 50m (164.04ft.) )
Содержание MELSEC-Q QD77MS
Страница 1: ......
Страница 27: ...A 26 MEMO...
Страница 29: ...MEMO...
Страница 101: ...3 34 Chapter 3 Specifications and Functions MEMO...
Страница 232: ...5 111 Chapter 5 Data Used for Positioning Control MEMO...
Страница 315: ...5 194 Chapter 5 Data Used for Positioning Control MEMO...
Страница 337: ...6 22 Chapter 6 Sequence Program Used for Positioning Control...
Страница 338: ...6 23 Chapter 6 Sequence Program Used for Positioning Control...
Страница 339: ...6 24 Chapter 6 Sequence Program Used for Positioning Control...
Страница 340: ...6 25 Chapter 6 Sequence Program Used for Positioning Control...
Страница 341: ...6 26 Chapter 6 Sequence Program Used for Positioning Control...
Страница 342: ...6 27 Chapter 6 Sequence Program Used for Positioning Control...
Страница 343: ...6 28 Chapter 6 Sequence Program Used for Positioning Control...
Страница 344: ...6 29 Chapter 6 Sequence Program Used for Positioning Control...
Страница 345: ...6 30 Chapter 6 Sequence Program Used for Positioning Control...
Страница 346: ...6 31 Chapter 6 Sequence Program Used for Positioning Control...
Страница 347: ...6 32 Chapter 6 Sequence Program Used for Positioning Control...
Страница 348: ...6 33 Chapter 6 Sequence Program Used for Positioning Control...
Страница 349: ...6 34 Chapter 6 Sequence Program Used for Positioning Control...
Страница 353: ...6 38 Chapter 6 Sequence Program Used for Positioning Control...
Страница 354: ...6 39 Chapter 6 Sequence Program Used for Positioning Control...
Страница 357: ...6 42 Chapter 6 Sequence Program Used for Positioning Control...
Страница 359: ...6 44 Chapter 6 Sequence Program Used for Positioning Control...
Страница 360: ...6 45 Chapter 6 Sequence Program Used for Positioning Control...
Страница 361: ...6 46 Chapter 6 Sequence Program Used for Positioning Control...
Страница 363: ...6 48 Chapter 6 Sequence Program Used for Positioning Control...
Страница 364: ...6 49 Chapter 6 Sequence Program Used for Positioning Control...
Страница 413: ...MEMO...
Страница 433: ...8 20 Chapter 8 OPR Control MEMO...
Страница 458: ...9 25 Chapter 9 Major Positioning Control MEMO...
Страница 593: ...10 30 Chapter 10 High Level Positioning Control MEMO...
Страница 625: ...11 32 Chapter 11 Manual Control MEMO...
Страница 659: ...12 34 Chapter 12 Expansion Control MEMO...
Страница 767: ...13 108 Chapter 13 Control Sub Functions MEMO...
Страница 813: ...14 46 Chapter 14 Common Functions MEMO...
Страница 831: ...15 18 Chapter 15 Dedicated Instructions MEMO...
Страница 846: ...16 15 Chapter 16 Troubleshooting MEMO...
Страница 892: ...16 61 Chapter 16 Troubleshooting MEMO...
Страница 971: ...Appendix 62 Appendices MEMO...
Страница 974: ......
Страница 975: ......







































































