



























Hardware
56 of 70
Hardware R2.2.8 11.98.02 en
6
Digital Servo Electronics (DSEAT)
6.1
Description of the DSEAT
In the KR C1 the main processor is responsible for all controller tasks except the drive control
functions, which require very short cycle times that would overload the main processor. The-
refore the drive control functions (position controller, speed controller, etc.) are implemented
on a separate slot--in card (or possibly two separate cards).
The DSEAT module on the multifunction card (MFC) is responsible for digital closed--loop
control of up to 8 axes, for controlling a servo power module by means of phase current set-
points and parameterization data and for processing the error and status messages read by
the servo power module. Additionally, the DSEAT communicates with the RDC.
G
Advantages of this concept:
--
An optimally adapted processor (RISC, DSP) can be selected for the drive section
on the DSEAT.
--
The software implementation on the PC processor (CISC Processor, Pentium) is
simpler, because no high--priority tasks have to be taken into account.
--
Windows conventions and the protected mode of the main processor do not have
to be taken into account during software development.
--
The two software sections can be developed largely independently of each other.
--
DSEAT provides a modular structure for expanding to higher numbers of axes.
The requisite computer power is automatically provided by the hardware simply
by plugging in an additional DSEAT.
6.2
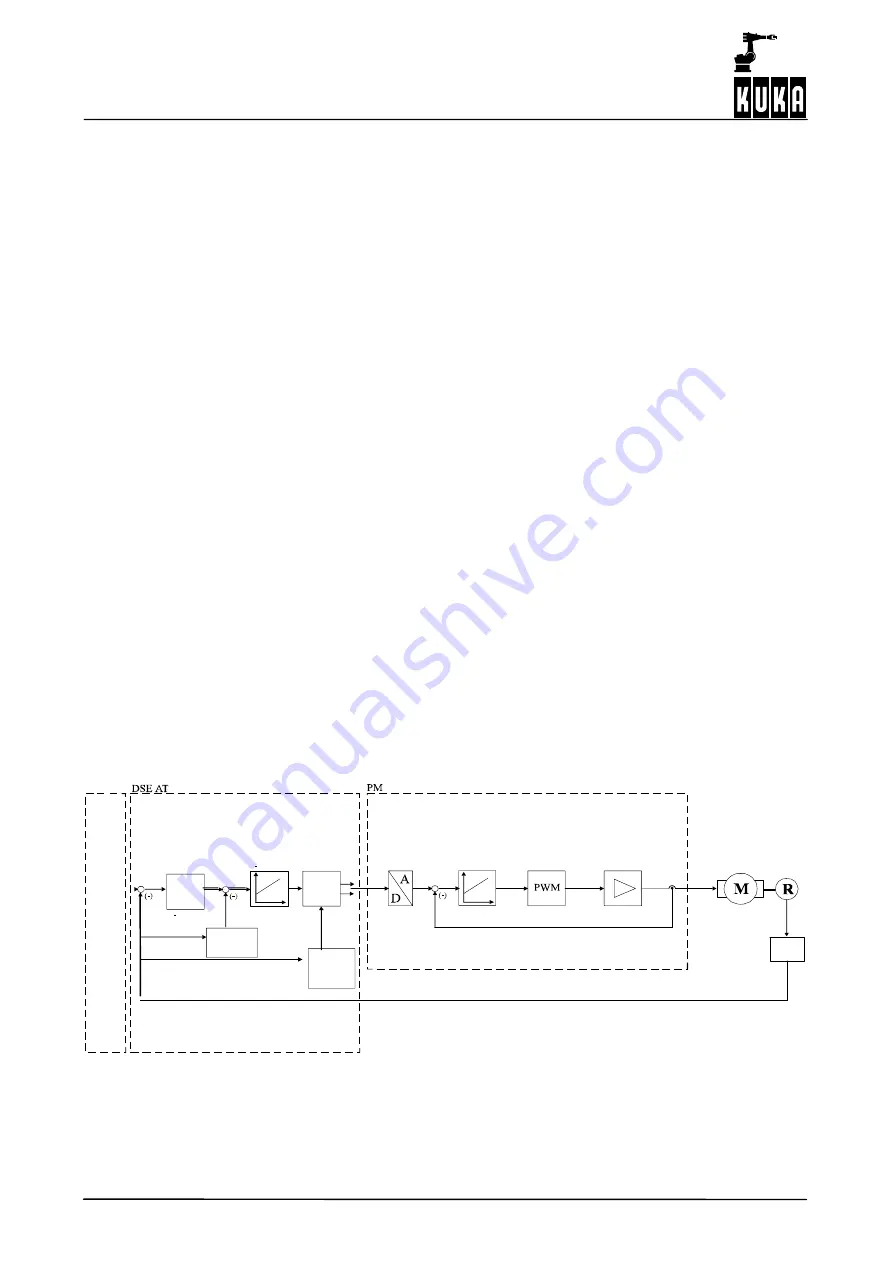
Schematic diagram of the controller architecture
Software
Hardware
Proc.
Position
setpoint
/IPO
Position
control
Difference
calculation
Speed
controller
Com-
muta-
tion
Calculate
rotor
position
Current
controller
Position
actual value
RDC
Fig. 36
Schematic diagram of the controller architecture
Содержание KR C1
Страница 1: ...Hardware R2 2 8 11 98 02 en 1 of 70 SOFTWARE KR C1 Hardware Release 2 2...
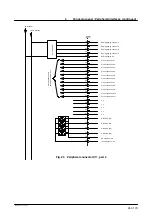
Страница 30: ...Hardware 30 of 70 Hardware R2 2 8 11 98 02 en Fig 13 Circuit diagram X931 X604...
Страница 31: ...4 Individual axis switch off for external axes continued 31 of 70 Hardware R2 2 8 11 98 02 en Fig 14 Outputs...
Страница 32: ...Hardware 32 of 70 Hardware R2 2 8 11 98 02 en Fig 15 Inputs...
Страница 34: ...Hardware 34 of 70 Hardware R2 2 8 11 98 02 en...
Страница 35: ...35 of 70 Hardware R2 2 8 11 98 02 en...
Страница 55: ...55 of 70 Hardware R2 2 8 11 98 02 en...







































































