






















Hardware
18 of 70
Hardware R2.2.8 11.98.02 en
2.7.1
Jumpering of the motor connectors
The motor connectors are inserted in accordance with the robot type connected.
Plug position (H1 / H2) :
I
max
(RMS) = 64 A
Plug position (M) :
I
max
(RMS) = 32 A
Plug position (L) :
I
max
(RMS) = 16 A
The controller detects the connector position and signals an incorrectly connected motor
cable.
With plug position (H), both cables must always be connected.
The controller does not detect whether the motor cables have been
interchanged. It is important to maintain the correct assignment of the motor
cables to the respective axes !
Содержание KR C1
Страница 1: ...Hardware R2 2 8 11 98 02 en 1 of 70 SOFTWARE KR C1 Hardware Release 2 2...
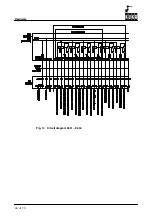
Страница 30: ...Hardware 30 of 70 Hardware R2 2 8 11 98 02 en Fig 13 Circuit diagram X931 X604...
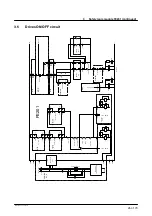
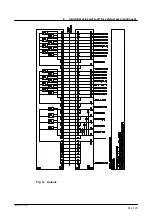
Страница 31: ...4 Individual axis switch off for external axes continued 31 of 70 Hardware R2 2 8 11 98 02 en Fig 14 Outputs...
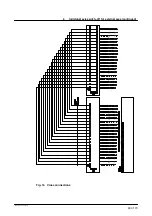
Страница 32: ...Hardware 32 of 70 Hardware R2 2 8 11 98 02 en Fig 15 Inputs...
Страница 34: ...Hardware 34 of 70 Hardware R2 2 8 11 98 02 en...
Страница 35: ...35 of 70 Hardware R2 2 8 11 98 02 en...
Страница 55: ...55 of 70 Hardware R2 2 8 11 98 02 en...







































































