




























GE Multilin
F60 Feeder Protection System
5-205
5 SETTINGS
5.6 GROUPED ELEMENTS
5
The positive-sequence restraint must be considered when testing for pick-up accuracy and response time (multiple of
pickup). The positive-sequence restraint is removed for low currents. If the positive-sequence current is less than 0.8 pu,
then the restraint is removed by changing the constant
K
to zero. This results in better response to high-resistance faults
when the unbalance is very small and there is no danger of excessive CT errors, since the current is low.
The
operating quantity
depends on the way the test currents are injected into the F60. For single phase injection:
•
I
op
=
⅓
×
(1 –
K
) ×
I
injected
for I_2 mode.
•
I
op
= (1 –
K
) ×
I
injected
for I_0 mode if I_1 > 0.8 pu.
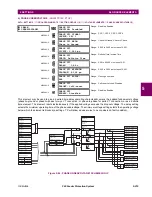
The
directional unit
uses the negative-sequence current (I_2) and negative-sequence voltage (V_2).
The following tables define the negative-sequence directional overcurrent element.
Table 5–32: NEGATIVE-SEQUENCE DIRECTIONAL OVERCURRENT UNIT
Table 5–33: NEGATIVE-SEQUENCE DIRECTIONAL UNIT
Z_offset is the offset impedance, for which magnitude is the OFFSET setting and angle is the FWD ECA.
The negative-sequence voltage must be greater than 0.02 pu to be validated for use as a polarizing signal. Additionally,
when offset impedance is applied and negative-sequence current is above 0.2 pu, compensated negative-sequence volt-
age -V_2 + Z_offset x I_2 has to be above 0.02 pu in order to discriminate fault direction; otherwise when negative-
sequence current is less than 0.2 pu, -V_2 is then used as the polarizing signal. If the polarizing signal is not validated nei-
ther forward nor reverse indication is given. The following figure explains the usage of the voltage polarized directional unit
of the element.
The following figure shows the phase angle comparator characteristics for a phase A to ground fault, with settings of:
ECA
= 75° (element characteristic angle = centerline of operating characteristic)
FWD LA = 80° (forward limit angle = ± the angular limit with the ECA for operation)
REV LA
= 80° (reverse limit angle = ± the angular limit with the ECA for operation)
MODE
OPERATING CURRENT
Negative-sequence
I
op
= |I_2| –
K
×
I_1|
Zero-sequence
I
op
= 3 × (|I_0| –
K
× |I_1|) if |I_1| > 0.8 pu
I
op
= 3 × |I_0| if |I_1|
≤
0.8 pu
DIRECTION
COMPARED PHASORS
Forward
–V_2
+
Z_offset
×
I_2
I_2
×
1
∠
ECA
Reverse
–V_2
+
Z_offset
×
I_2
–(I_2
×
1
∠
ECA)
Содержание F60
Страница 10: ...x F60 Feeder Protection System GE Multilin TABLE OF CONTENTS ...
Страница 30: ...1 20 F60 Feeder Protection System GE Multilin 1 5 USING THE RELAY 1 GETTING STARTED 1 ...
Страница 138: ...4 28 F60 Feeder Protection System GE Multilin 4 2 FACEPLATE INTERFACE 4 HUMAN INTERFACES 4 ...
Страница 454: ...5 316 F60 Feeder Protection System GE Multilin 5 10 TESTING 5 SETTINGS 5 ...
Страница 500: ...7 14 F60 Feeder Protection System GE Multilin 7 1 COMMANDS 7 COMMANDS AND TARGETS 7 ...
Страница 508: ...8 8 F60 Feeder Protection System GE Multilin 8 2 FAULT LOCATOR 8 THEORY OF OPERATION 8 ...
Страница 522: ...10 12 F60 Feeder Protection System GE Multilin 10 6 DISPOSAL 10 MAINTENANCE 10 ...
Страница 660: ...B 116 F60 Feeder Protection System GE Multilin B 4 MEMORY MAPPING APPENDIX B B ...
Страница 706: ...E 10 F60 Feeder Protection System GE Multilin E 1 IEC 60870 5 104 APPENDIX E E ...
Страница 718: ...F 12 F60 Feeder Protection System GE Multilin F 2 DNP POINT LISTS APPENDIX F F ...
Страница 728: ...H 8 F60 Feeder Protection System GE Multilin H 2 ABBREVIATIONS APPENDIX H H Z Impedance Zone ...
Страница 730: ...H 10 F60 Feeder Protection System GE Multilin H 3 WARRANTY APPENDIX H H ...







































































